

A method for autonomous operation control of an excavating robot
A control method and robot technology, which can be applied to earth moving machines/shovels, program-controlled manipulators, manipulators, etc., can solve the problems of high physical and mental consumption, harsh working environment, high labor intensity, etc., and achieve high position repeatability. , The effect of good human-computer interaction and high degree of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
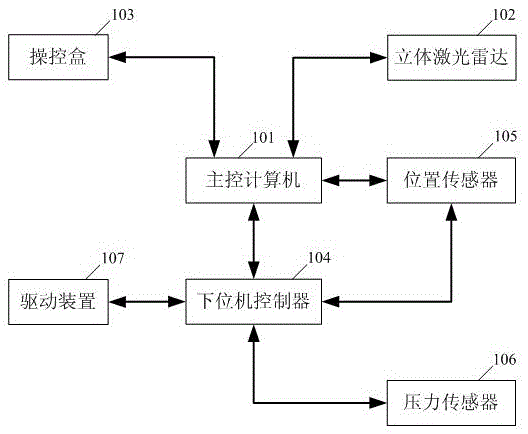
[0030] figure 1 It is a connection relationship block diagram between each component of the present invention, from figure 1 It can be seen from the figure that the excavating robot autonomous operation control system of the present invention includes a main control computer 101, a stereo laser radar 102, a control box 103, a lower computer controller 104, a position sensor 105, a pressure sensor 106 and a driving device 107. The main control computer 101 is connected with the stereo lidar 102 , the control box 103 , the position sensor 105 and the lower computer controller 104 , and the lower computer controller 104 is connected with the driving device 107 , the position sensor 105 and the pressure sensor 106 .
[0031] The main control computer 101 communicates with the control box 103 and the stereo laser radar 102 through Ethernet, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More