

Point cloud based 3D reconstruction method for operation scene of distribution line
A technology for operation scenarios and power distribution lines, applied in image analysis, image enhancement, instruments, etc., can solve problems that affect registration efficiency, reduce registration accuracy, and reduce modeling speed, so as to optimize registration methods and reduce The effect of human intervention and speed improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0073] (1) object
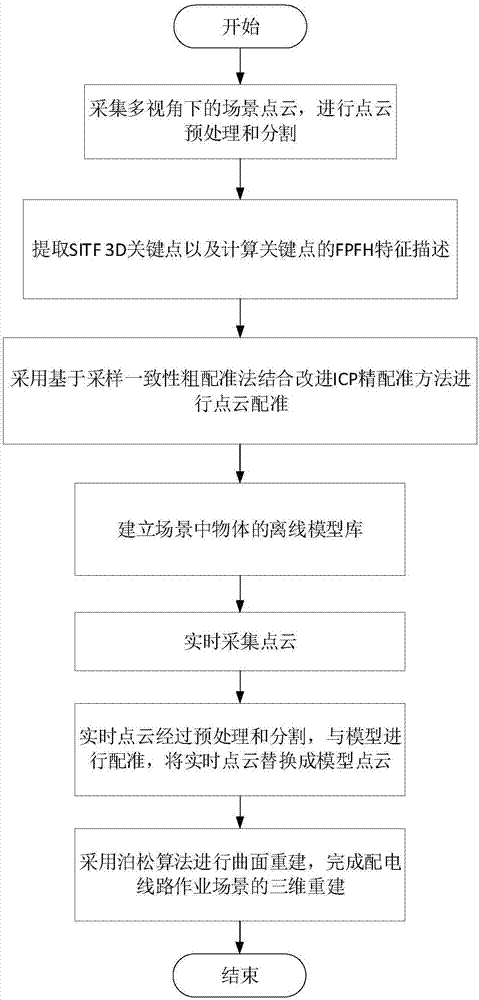
[0074] For the simulated real distribution line scene built according to the power standard, the point cloud of the scene is collected through kinect2.
[0075] (2) Process results
[0076] The core of the method of the present invention lies in three processes: preprocessing, segmentation and registration, and the experimental simulation effect of the method will be shown in the following three aspects.
[0077] First, after conditional filtering, downsampling, and outlier removal operations, the preprocessing result graph is obtained, as shown in Figure 5 As shown. These operations can select the area of interest in the job scene, uniformly sample the point cloud that is too dense to make the number of point clouds appropriate, and remove the interference caused by noise.
[0078] Then, the color region growth method is used to realize the automatic segmentation of the arrester and the crossarm, and the segmentation effect is as follows Image 6 As ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More