

Pitching freedom degree redundant posture structure of connecting rod structure manipulator
A connecting rod structure and operator technology, applied in the field of robotics, can solve the problems affecting the dexterity of the main operator, easy to produce singular configurations, etc., and achieve the effects of improving flexibility and operating space, simplifying structure, and reducing size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
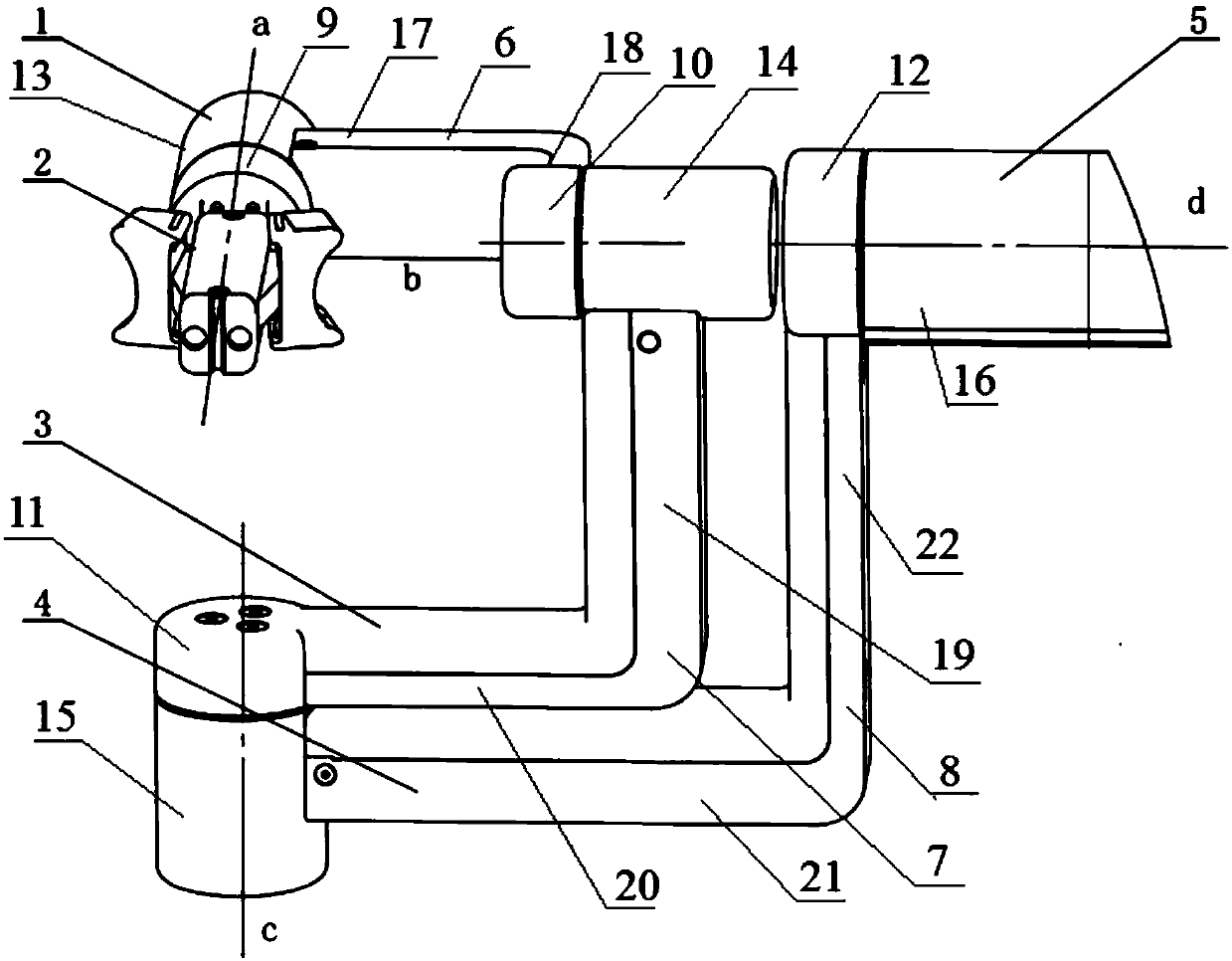
[0012] Specific implementation mode one: combine figure 1 Describe the present embodiment. The pitching degree of freedom redundant posture structure in the hands of the link structure operator described in the present embodiment includes a posture pitching mechanism 1, a posture turning mechanism 2, a posture deflection mechanism 3, a posture pitching redundant mechanism 4, a horizontal Rod mechanism 5, the first 'L' shaped bar 6, the second 'L' shaped bar 7 and the third 'L' shaped bar 8; the attitude pitching mechanism 1 includes the first attitude rotary motor 13 and the first rotating body 9; attitude The deflection mechanism 3 includes a second attitude turning motor 14 and a second turning body 10; the attitude pitch redundant mechanism 4 includes a third attitude turning motor 15 and a third turning body 11; the horizontal rod mechanism 5 includes a fourth attitude turning motor 16, a Four swivel bodies 12 and horizontal rods, one end of the housing of the fourth attit...
specific Embodiment approach 2
[0013] Specific implementation mode two: combination figure 1 Describe this embodiment, the redundant posture structure of the pitching degree of freedom in the hands of a link structure operator described in this embodiment, the first 'L' shaped rod 6 includes a first connecting rod 17 and a second connecting rod 18, the first connecting rod One end of 17 is fixedly connected with the outer wall of the housing of the first attitude rotary motor 13, the other end of the first connecting rod 17 is fixedly connected with one end of the second connecting rod 18, and the other end of the second connecting rod 18 is connected with the second rotating body 10 For fixed connection, the first connecting rod 17 and the second connecting rod 18 are arranged vertically. Other compositions and connection methods are the same as those in Embodiment 1.
specific Embodiment approach 3
[0014] Specific implementation mode three: combination figure 1 This embodiment is described. In this embodiment, a link structure operator hands with redundant attitude structure of pitching degree of freedom, the second 'L' shaped rod 7 includes a third connecting rod 19 and a fourth connecting rod 20, the third connecting rod One end of 19 is fixedly connected with the outer wall of the second attitude rotary motor 14 housing, the other end of the third connecting rod 19 is fixedly connected with one end of the fourth connecting rod 20, and the other end of the fourth connecting rod 20 is connected with the third rotating body 11 Fixedly connected, the third connecting rod 19 and the fourth connecting rod 20 are arranged vertically. Other compositions and connection methods are the same as those in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More