

Positioning method based on scene recognition, electronic device, storage medium, and system
A positioning method and scene technology, applied in image data processing, measuring devices, instruments, etc., can solve problems such as robot kidnapping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Below, the present invention will be further described in conjunction with the accompanying drawings and specific implementation methods. It should be noted that, under the premise of not conflicting, the various embodiments described below or the technical features can be combined arbitrarily to form new embodiments. .
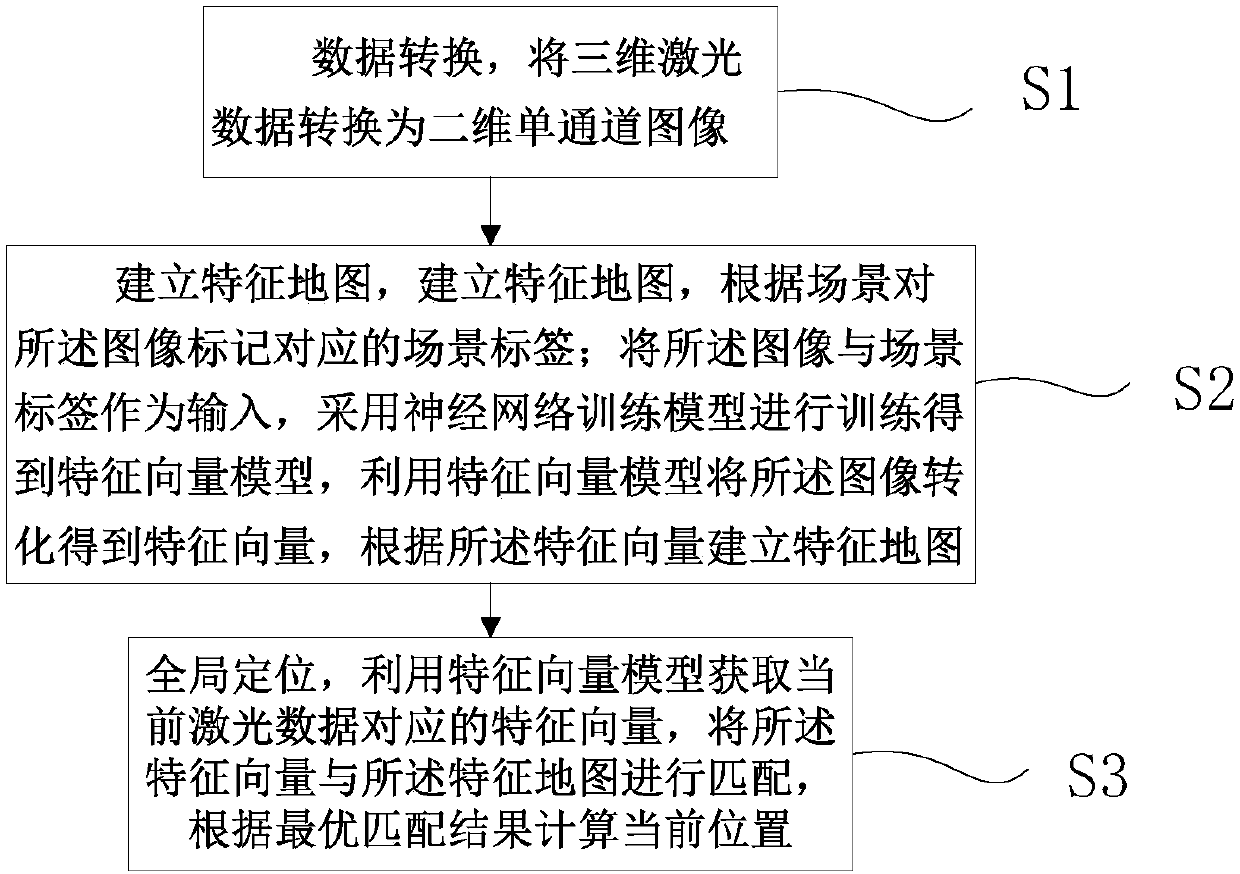
[0035] Location methods based on scene re-recognition, such as figure 1 shown, including the following steps:
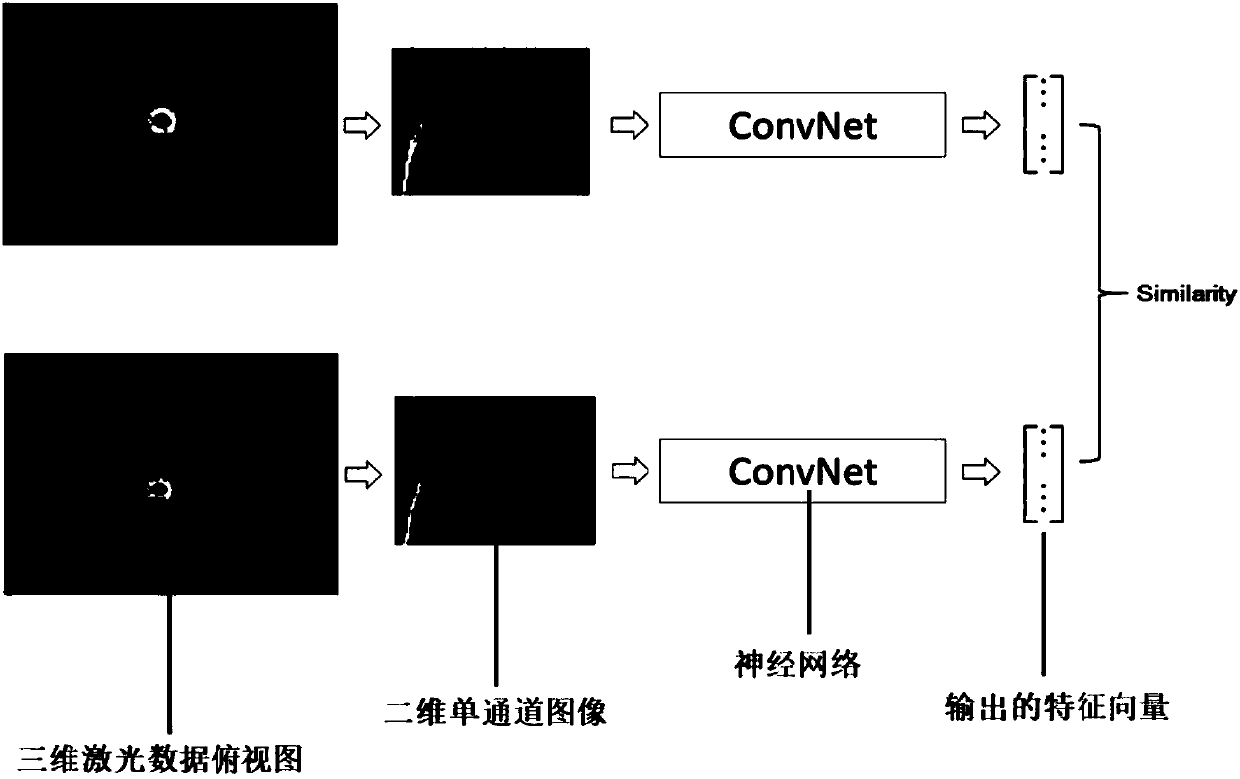
[0036] S1. Data conversion, converting three-dimensional laser data into two-dimensional single-channel images;
[0037] S2. Establish a feature map, mark the image, and obtain the label corresponding to the image; use the image and the label as input, use the neural network training model to train to obtain the feature vector, and establish the feature map according to the feature vector;
[0038] S3. Global positioning, matching the current laser data with the existing feature map, and selecting the closest matching result as the current ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More