

A metamorphic palletizing robot mechanism with full degrees of freedom in space
A palletizing robot and metamorphic mechanism technology, which is applied in the field of space full-degree-of-freedom metamorphic mechanism-type palletizing robot mechanism, can solve the problems of low manufacturing cost, complicated installation procedure, complex structure, etc., and achieve easy processing, manufacturing, debugging and installation , Realize the effect of simple conditions and simple overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings and embodiments. Apparently, the embodiments are only a part of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without creative efforts fall within the protection scope of the present invention.
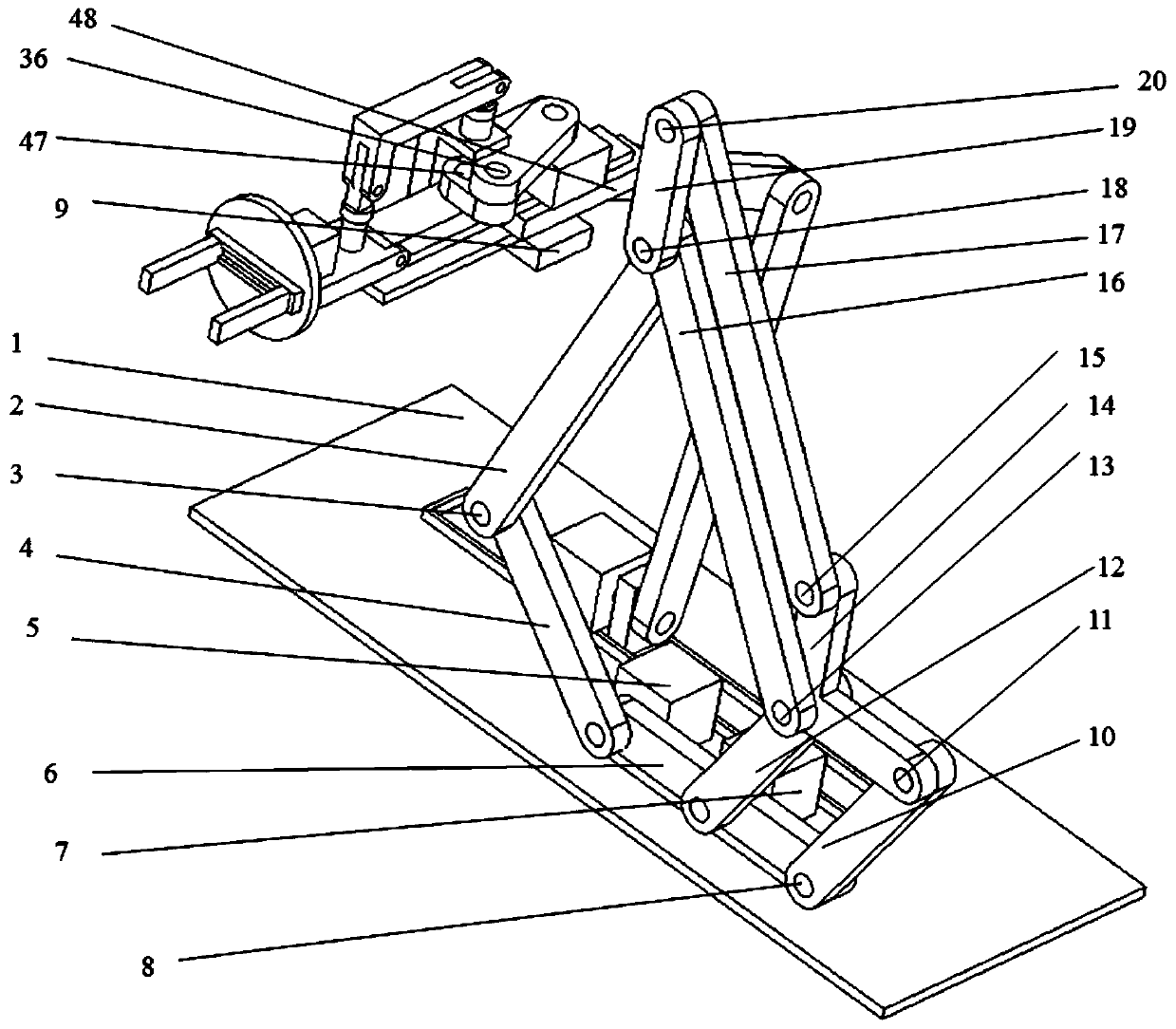
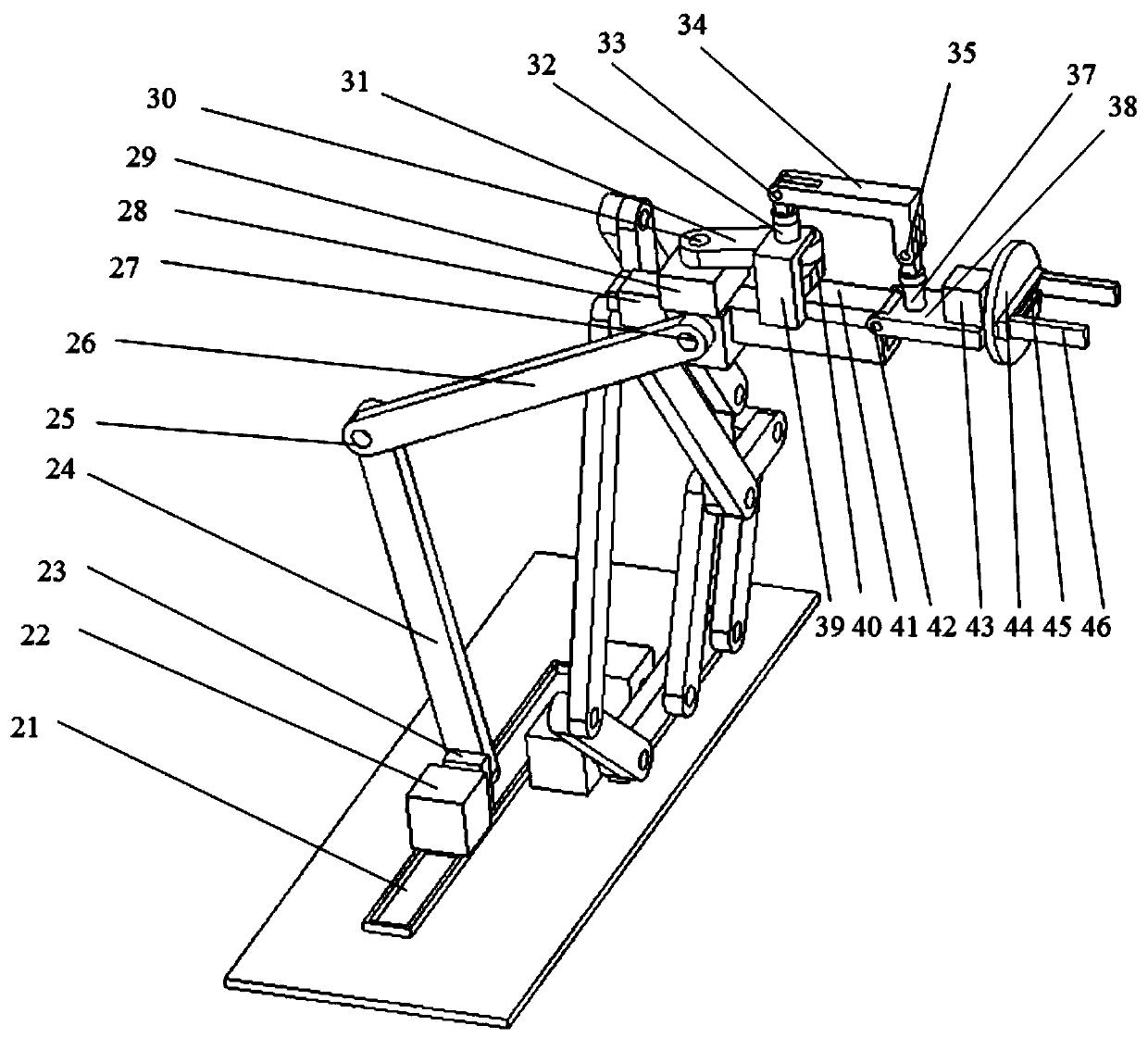
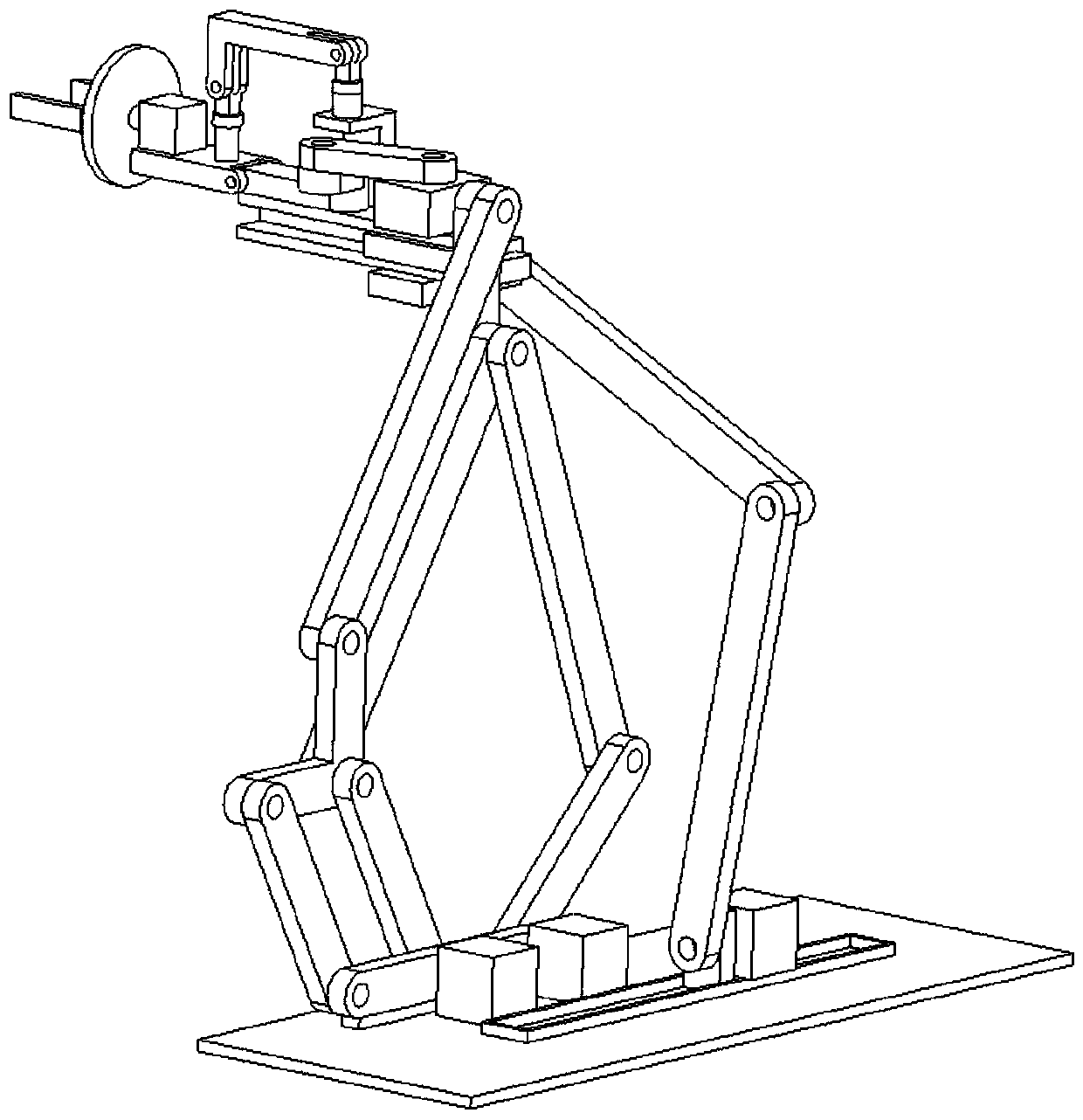
[0032] Such as Figure 1 to Figure 5 As shown, the space full-degree-of-freedom metamorphic palletizing robot mechanism of the present invention includes a platform 1, a plane positioning mechanism, a space driving mechanism and a manipulator assembly. The specific structure and connection relationship are:
[0033]The plane positioning mechanism includes a first controllable motor 7, a second controllable motor 5, a platform fixing rod 6, a first input rod 12, a second input rod 4, a first auxiliary input rod 10, a l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More