

A wall-climbing robot
A technology of a wall-climbing robot and a robotic arm, which is applied in the field of wall-climbing robots, can solve the problems of slow crawling speed and poor obstacle-surmounting ability of a wheel-type wall-climbing mechanism, and achieves strong obstacle-surmounting ability, increased wall adaptability and adsorption force. big effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and embodiments. However, it should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the scope of the present invention.
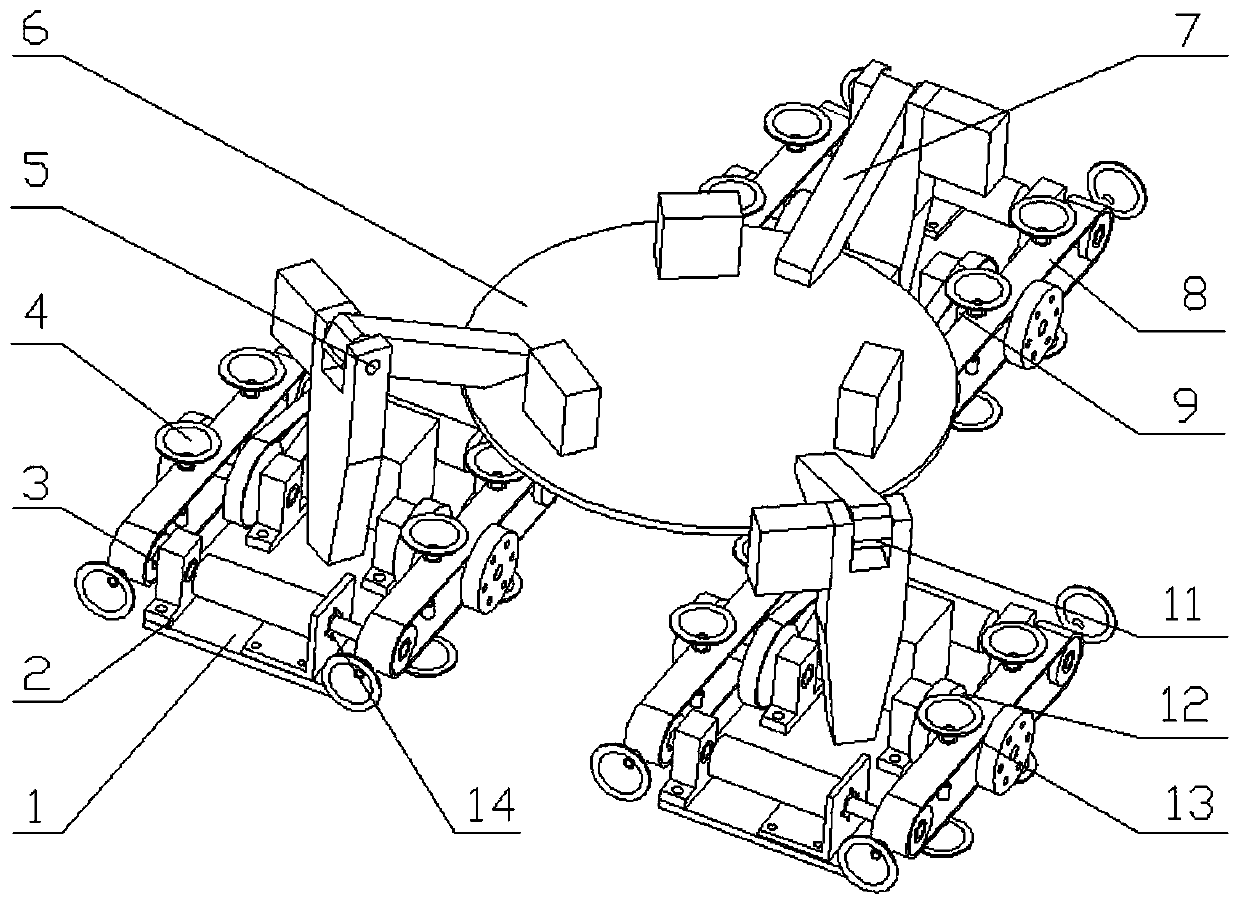
[0025] Such as figure 1 As shown, a wall-climbing robot includes a safety protection device, an equipment carrying platform 6, and three crawling and obstacle-climbing mechanisms 11 distributed along the circumference of the equipment carrying platform 6; the equipment carrying platform 6 can be loaded with crack detection instruments, concrete Inspection and maintenance equipment such as glue injection machines to achieve functional diversification; the safety protection device is used as a protection device for the robot; the safety protection device includes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More