

A LiDAR-based autonomous positioning method for robots
A laser radar and autonomous positioning technology, applied in the direction of instruments, electromagnetic wave re-radiation, measurement devices, etc., can solve the problems of high construction difficulty of positioning technology, difficult to meet the high-precision positioning requirements of automatic inspection of substations, low positioning accuracy, etc. Improve alignment effect, high-reliability autonomous positioning and trackless navigation, positioning accuracy and positioning convergence speed improvement effect
Active Publication Date: 2019-10-08
HUAZHONG UNIV OF SCI & TECH
View PDF4 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0004] In order to solve the above defects and improvement needs of the prior art, the present invention provides a laser radar-based robot autonomous positioning method, thereby solving the problems of high construction difficulty, low positioning accuracy, and difficulty in satisfying the automatic patrol inspection of substations in the existing positioning technology. Technical Issues Requirements for High Accuracy Positioning
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
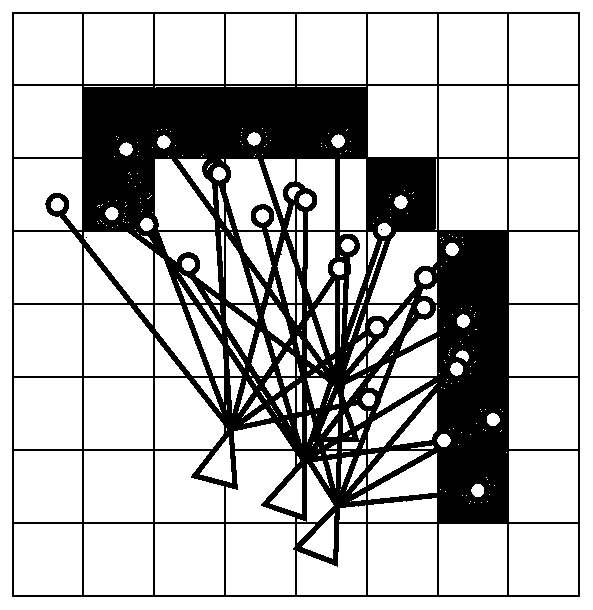
[0071] The autonomous positioning experiment of the mobile robot lidar in Embodiment 1 of the present invention is shown in FIG. 5 . The positioning experiment was carried out on a grid map with a size of 16.075m×9.9m and a resolution of 2.5cm. It can be seen from Figure 5(a) that a large number of particles are generated near the initial pose estimation (small arrows, the minimum number of particles is 500, and the maximum number is 5000). During the movement of the robot, the particles converge gradually, as shown in Figure 5(b) and Figure 5(c). The big arrow in the figure indicates the running posture of the robot at each moment, and the point cloud is the laser scanning point cloud.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
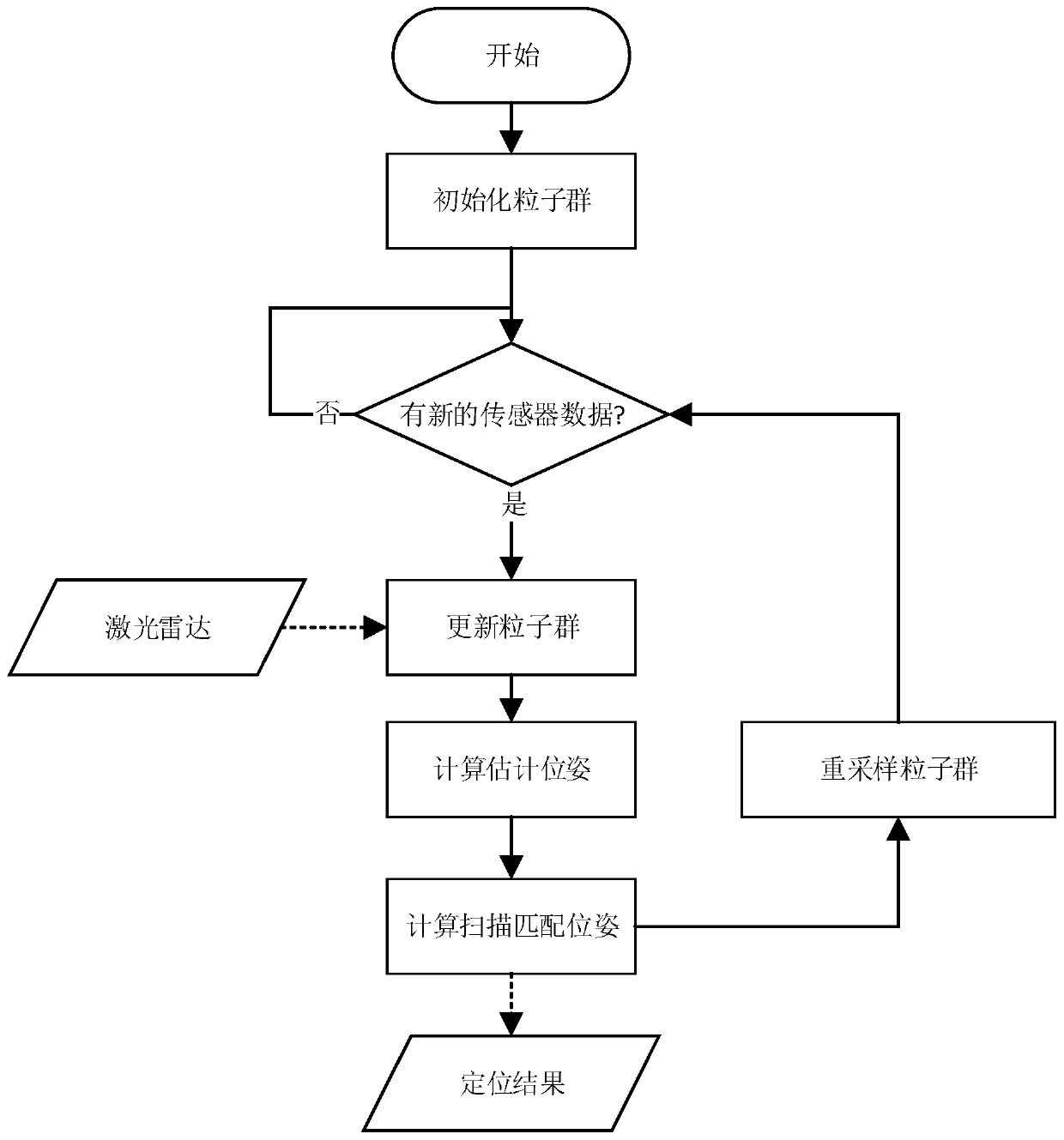
The invention discloses a method for autonomously localizing robots on the basis of laser radar. The method includes randomly generating N particles to form particle swarms around initial locations ofthe robots, and updating the particle swarms according to robot real-time movement distances and real-time rotation angles measured by sensors of the robots at current operation moments of the robots; computing the superposition quantity of point cloud of the laser radar and obstacles of maps for each particle to use the superposition quantity as a score of the particle, computing weighted position and posture average values of the particle swarms by the aid of the score, which is used as a weight, of each particle and utilizing the weighted position and posture average values as AMCL (adaptive Monte Carlo localization) estimation positions and posture; utilizing the AMCL estimation positions and posture as initial values, acquiring scanned and matched positions and posture by the aid ofscanning and matching algorithms on the basis of Gauss-Newton iterative processes and utilizing the scanned and matched positions and posture as the optimal positions and posture of the robots at thecurrent operation moments; re-sampling the particle swarms by the aid of AMCL algorithms to ultimately obtain the global optimal positions and posture of the robots during operation. The global optimal positions and posture of the robots are used as localization results. The method has the advantage that the localization convergence rate can be greatly increased, and the localization precision andthe localization stability can be greatly enhanced.
Description
technical field [0001] The invention belongs to the technical field of mobile robot positioning and navigation, and more specifically relates to a laser radar-based autonomous positioning method for a robot. Background technique [0002] With the rapid development of intelligence, mobile robots have been widely used in various industries. In the unattended substation of the power system, the robot automatic inspection system is an important direction for the intelligent development of the substation. In order to realize robot intelligent inspection, reliable and accurate autonomous positioning and navigation technology is the foundation. The existing unattended substation automatic inspection robot system generally needs to install auxiliary positioning devices such as laser reflectors, magnetic nails, radio frequency tags or two-dimensional codes, and requires certain transformation of the substation, which will not only increase the difficulty of construction, And the re...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityPatents(China)
IPC IPC(8): G01S17/88G01C21/16
Inventor彭刚郑威陆泽早
OwnerHUAZHONG UNIV OF SCI & TECH