

Sweeping robot and obstacle avoidance method and device of sweeping robot
A sweeping robot and obstacle avoidance technology, which is applied to manual sweeping machines, carpet cleaning, floor cleaning, etc., can solve the problems of robots getting stuck, sweeping machines getting under the sofa, and sweeping robots with abrupt vision, so as to prevent objects from getting stuck effect at the bottom
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
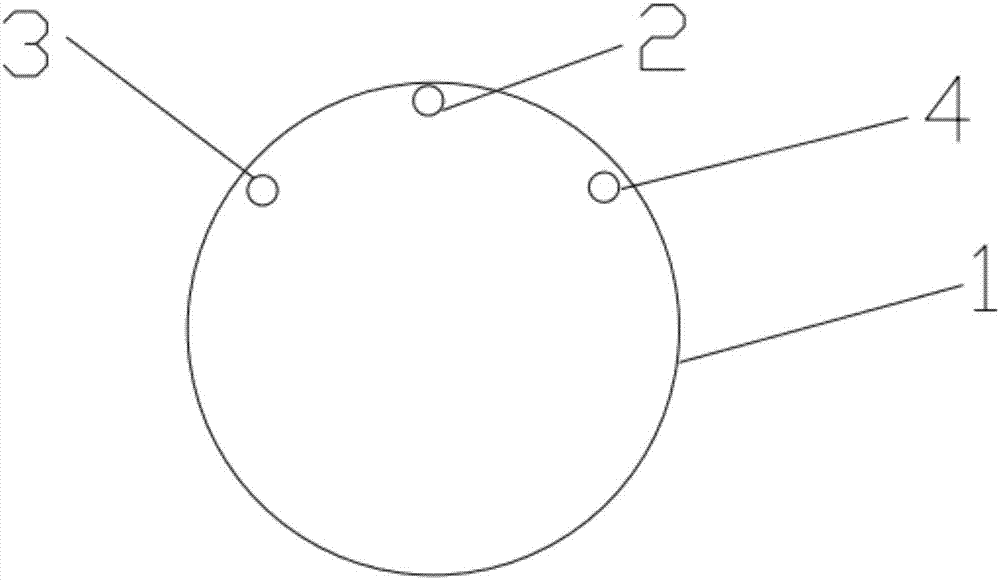
[0028] refer to figure 1 The sweeping robot 1 proposed by the present invention includes a control module and a distance detection module. The control module is arranged in the panel of the sweeping robot 1, which may be specifically a microprocessor. The distance detection module is arranged near the top of the sweeping robot 1 panel. In the area of the front edge, the front edge is the edge of the panel in the forward direction of the cleaning robot 1 . The above-mentioned control module is electrically connected to the above-mentioned distance detection module, and the above-mentioned distance detection module is used to detect the distance detection signal between the sweeping robot 1 panel and the bottom surface of the object, which is specifically a sensor or module capable of detecting the second distance det...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More