

A jumping robot with attitude balance adjustment mechanism
A technology of balance adjustment and balance mechanism, which is applied in the field of jumping robots, can solve the problems of limited adjustment range, complex structure and control, etc., and achieve the effects of reduced quality, compact mechanism, and good attitude adjustment ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
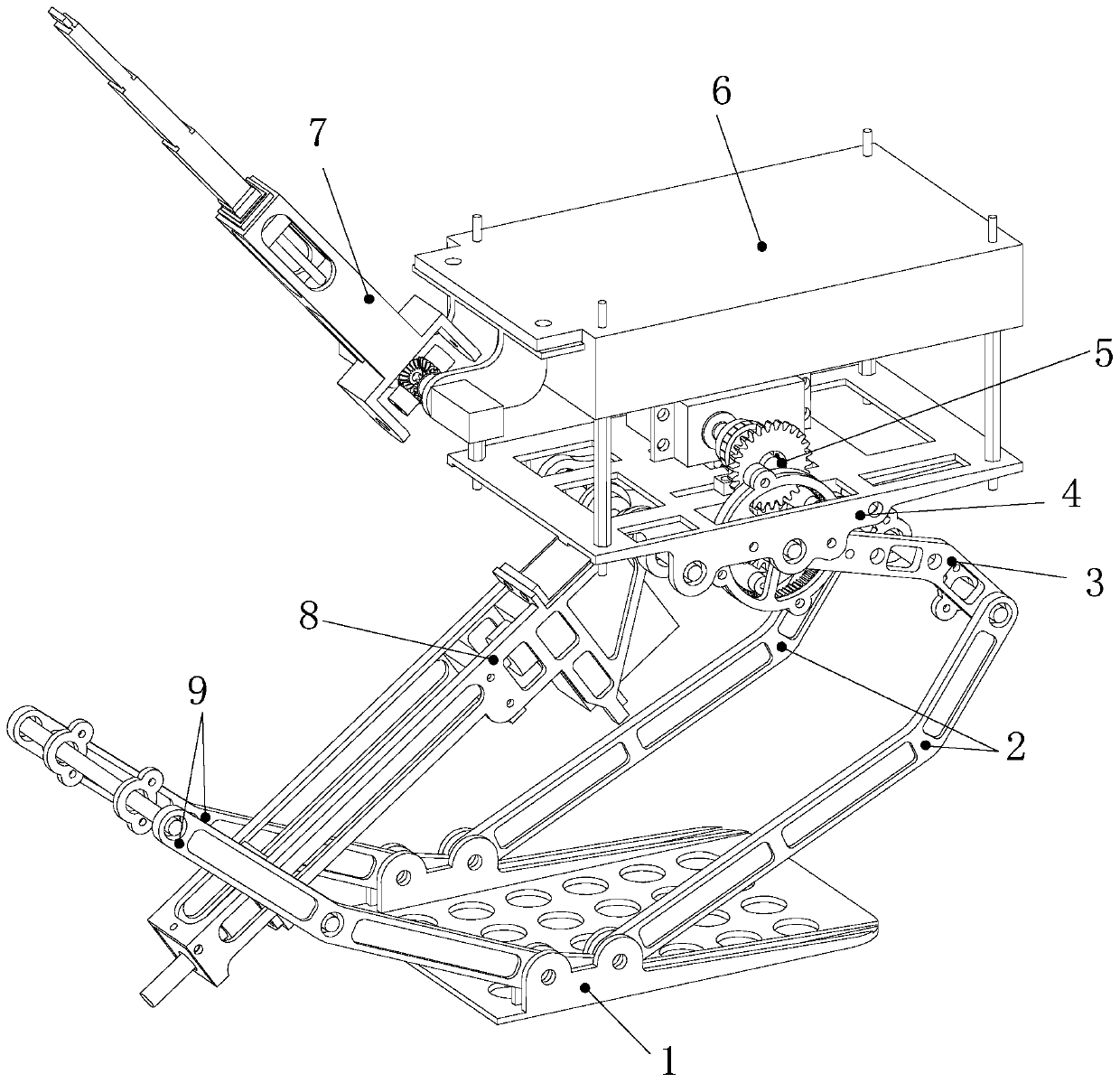
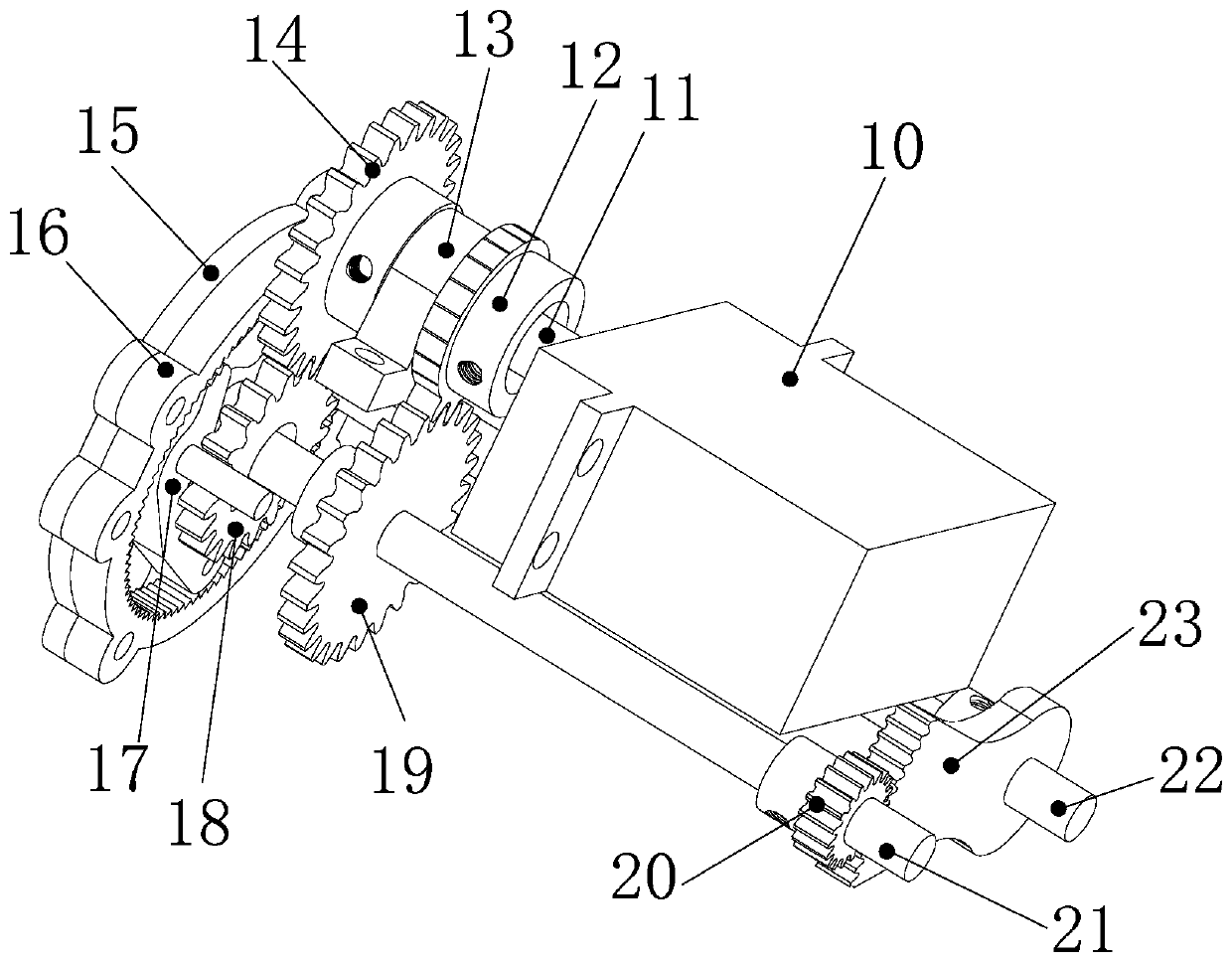
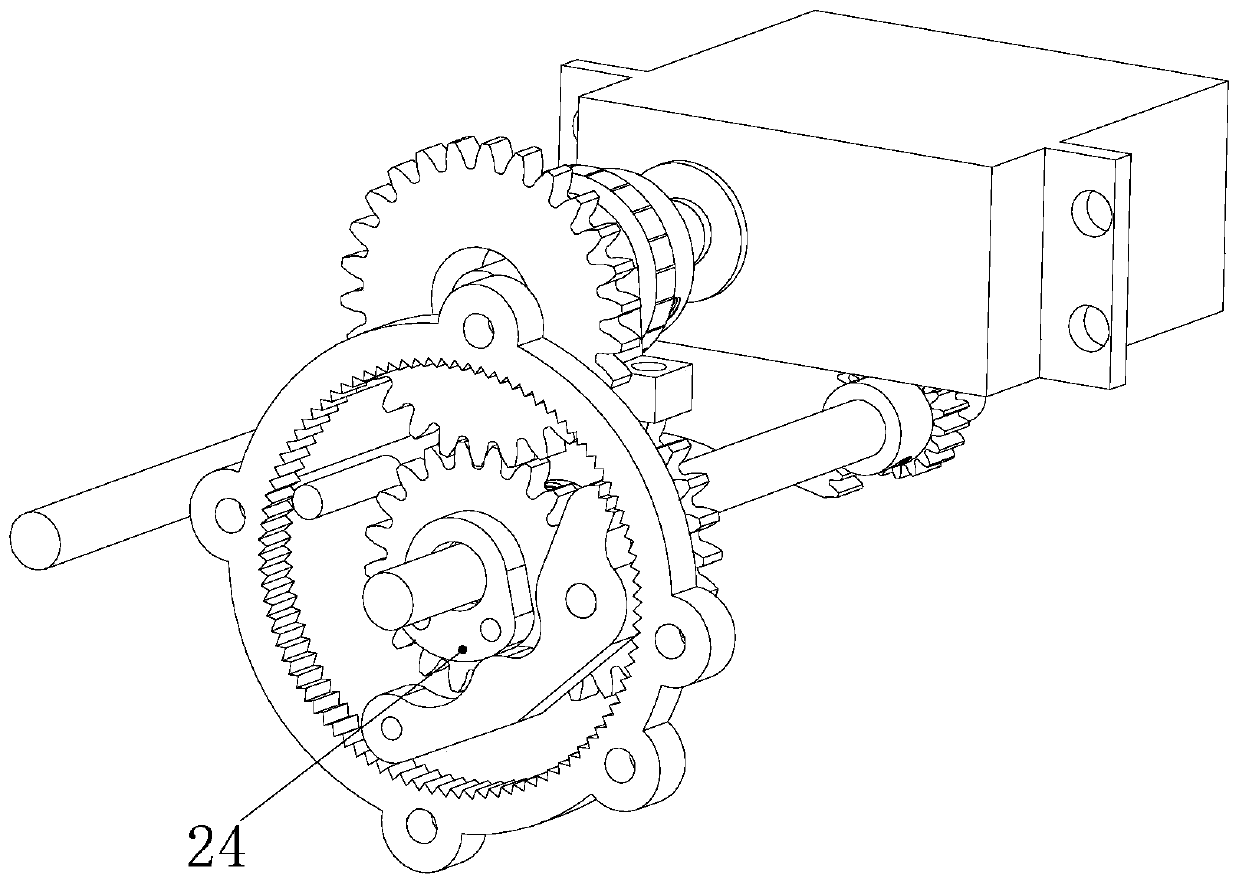
[0023] figure 1 It is a structural schematic diagram of the present invention; as shown in the figure: the jumping robot with the posture balance adjustment mechanism of the present embodiment includes a jumping robot body and a tail balance mechanism 7 arranged on the jumping robot body; the tail balance mechanism 7 includes a fixed The connecting frame 25 on the jumping robot body, the tail body 29 and the tail control mechanism arranged between the connecting frame 25 and the tail body 29 for driving the tail body 29 to swing relative to the connecting frame 25; the tail control mechanism It includes a first bevel gear and a second bevel gear that are coaxially arranged on the connecting frame 25 and are respectively driven and rotated by the first drive motor 26 and the second drive motor 33, and coaxially arranged on the tail body 29. The third bevel gear and the fourth bevel gear meshed between the first bevel gear and the second bevel gear (the third bevel gear is hinge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More