

Decelerating and damping method for unmanned aerial vehicle accidental crashing
An unmanned aerial vehicle, unexpected technology, applied in the direction of rotorcraft, motor vehicles, aircraft parts, etc., can solve the problems of economic loss of the drone holder, the parachute cannot be fully deployed, and the protective effect cannot be achieved, and the design is novel. , Reasonable structure, strong safety and reliability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
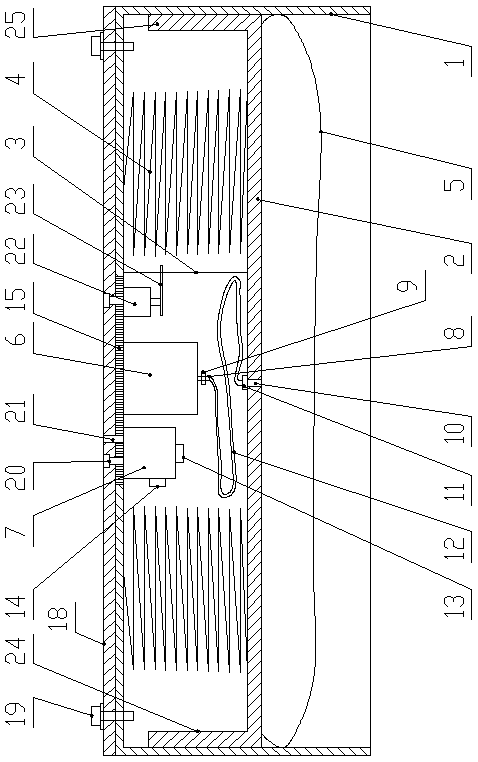
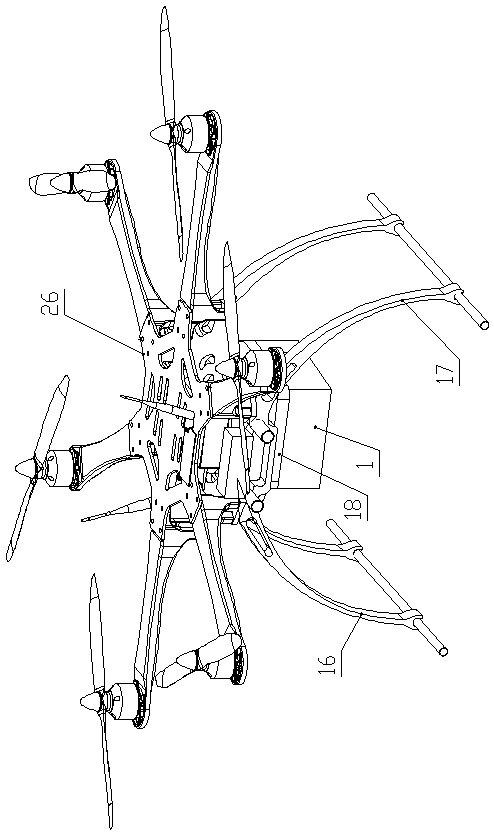
[0025] Such as figure 1 and figure 2 As shown, the accidental fall deceleration and shock absorption method of the drone of the present invention, the drone includes the drone main body 26, the first landing gear 16, the second landing bracket 17 and the horizontal plate 18, and the horizontal plate 18 is fixedly arranged on the first The top of the landing bracket 16 and the second landing bracket 17, the drone main body 26 is installed on the upper surface of the horizontal plate 18;
[0026] The deceleration and shock absorption method includes the following steps:
[0027] (1) Install a deceleration and shock absorbing device on the lower surface of the horizontal plate;
[0028] The deceleration and shock absorbing device includes a square box 1 with an open bottom. The square box 1 is located between the first landing bracket 16 and the second landing bracket 17. The top of the square box 1 is in contact with the lower surface of the horizontal plate 18 and is fastene...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More