

Optimization method of minimum acceleration trajectory of 7-DOF humanoid-arm-provided flying object in operation
A 7-DOF, trajectory optimization technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as robot body disturbance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0087] Embodiment: effect of the present invention can be further illustrated by following experimental simulation:
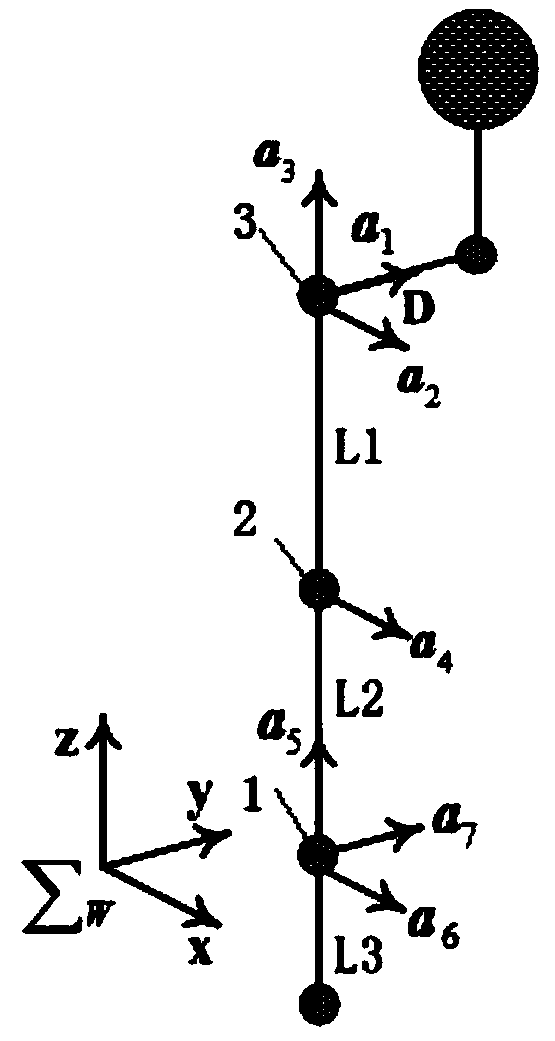
[0088] according to figure 1 The designed seven-degree-of-freedom humanoid arm joint structure model is shown, and the following tables 1 to 3 are the constraint ranges of the joint angles, velocities, and accelerations of the humanoid arm.
[0089] Table 1 Angle range of each joint of the 7-DOF redundant dexterous arm (degrees)
[0090]
[0091] Table 2 The maximum velocity value of each joint of the 7-DOF redundant dexterous arm (rad / s)
[0092]
[0093] Table 3 The maximum acceleration value of each joint of the 7-DOF redundant dexterous arm (rad / s 2 )
[0094]
[0095] Suppose the width of the shoulder of the human arm is D=0.14m, and the length from the shoulder to the elbow of the upper arm is L 1 =0.26m, distance L from elbow to wrist of lower arm 2 =0.25m, distance L from wrist to palm 3 =0.14m; set the shoulder as the origin of the world...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More