Elevator starting torque compensation method
A technology of starting torque and compensation method, which is applied to elevators, elevators, transportation and packaging in buildings, etc. It can solve the problems of slow elevator movement, fast opening of elevator brakes, and deviation of torque compensation value from the actual required value, etc., to achieve The effect of fast calculation speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
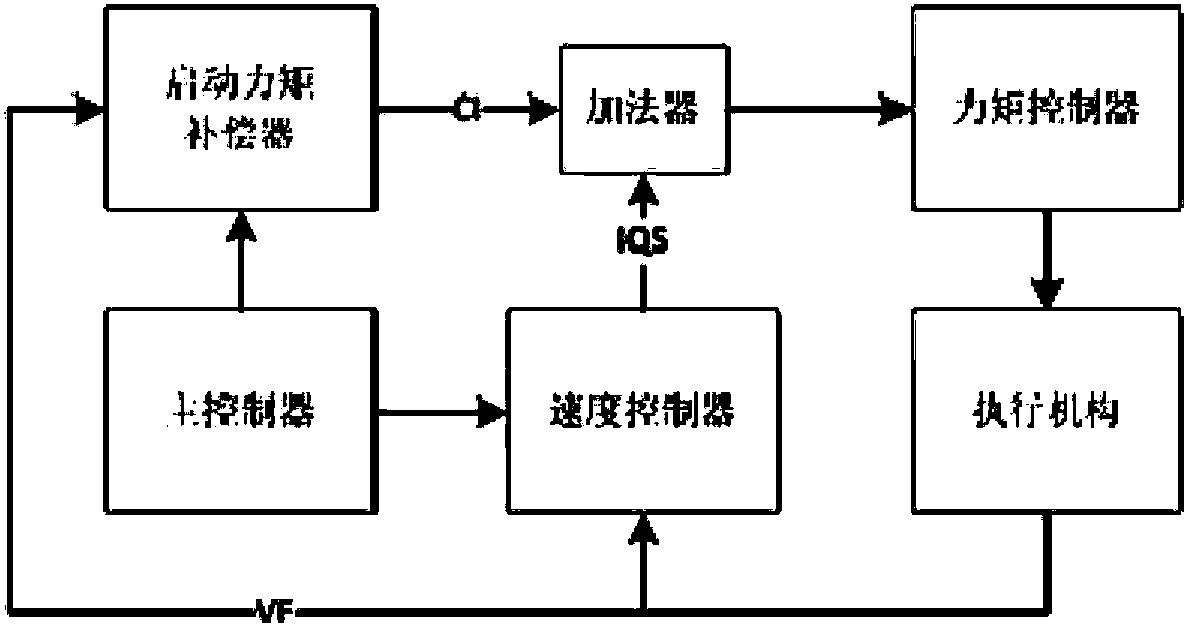
Method used
Image

Examples
Embodiment 1
[0068] This embodiment is suitable for elevators without weight sensors, and the steps are as follows:
[0069] Step 1, define variables RI and DI.
[0070] Step 2, assign the following variables as:
[0071] CI = 0;
[0072] RI=0;
[0073] DI=ratedI;
[0074] in:
[0075] ratedI is the moment value required to maintain the force balance when the rated load is placed in the car.
[0076] Step three, if the elevator is running, monitor the elevator speed feedback signal VF; otherwise, go to step two.
[0077] If VF=0, re-execute step 3;
[0078] Otherwise, the following calculations are performed:
[0079] If VF>0, then:
[0080] DI=DI / 2;
[0081] RI = RI - DI;
[0082] If VF<0, then:
[0083] DI=DI / 2;
[0084] RI=RI+DI;
[0085] Step 4, assign a value to the torque compensation value CI:
[0086] CI=RI;
[0087] Step five, execute step three.
[0088] Obviously, this embodiment is figure 2 A special case of the flow chart shown, that is, the constant constI i...
Embodiment 2
[0093] This embodiment is suitable for elevators without weight sensors, and the steps are as follows:
[0094] Step 1, define variables NI, RI, DI.
[0095] Step 2, assign the following variables as:
[0096] CI = 0;
[0097] ni = 0;
[0098] RI=0;
[0099] DI=ratedI;
[0100] in:
[0101] ratedI is the moment value required to maintain the force balance when the rated load is placed in the car.
[0102] Step three, if the elevator is running, monitor the elevator speed feedback signal VF; otherwise, go to step two.
[0103] If VF=0, re-execute step 3;
[0104] Otherwise, the following calculations are performed:
[0105] If VF>0, then:
[0106] NI = RI - DI;
[0107] DI=DI / 2;
[0108] RI = RI - DI;
[0109] If VF<0, then:
[0110] NI=RI+DI;
[0111] DI=DI / 2;
[0112] RI=RI+DI;
[0113] Step 4, assign a value to the torque compensation value CI:
[0114] CI=NI;
[0115] Step five, execute step three.
[0116] Obviously, this embodiment is figure 2 A speci...
Embodiment 3
[0121] This embodiment is suitable for elevators without weight sensors, and the steps are as follows:
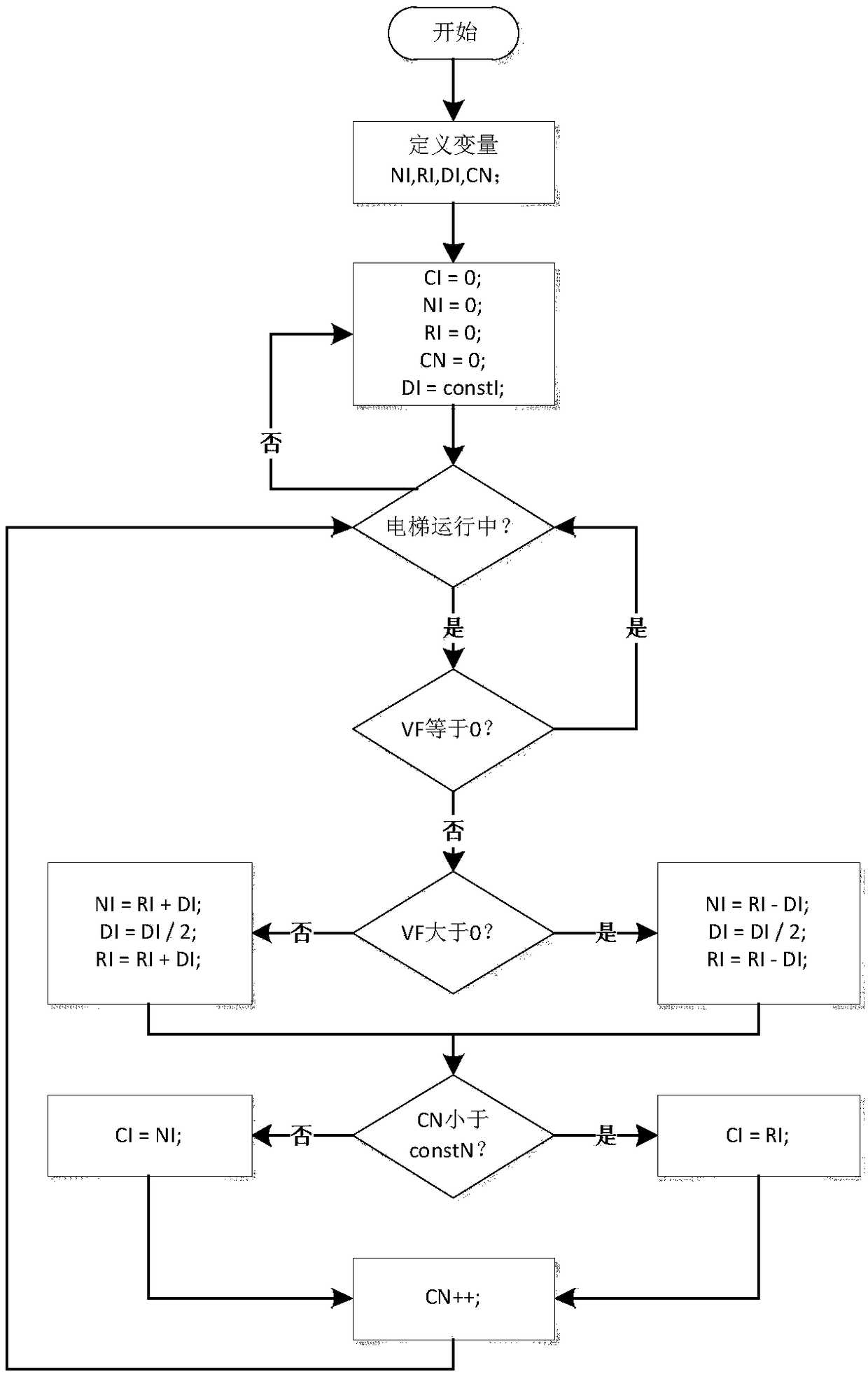
[0122] Step 1, define variables NI, RI, DI, CN.
[0123] Step 2, assign the following variables as:
[0124] CI = 0;
[0125] ni = 0;
[0126] RI=0;
[0127] CN=0;
[0128] DI=ratedI;
[0129] in:
[0130] ratedI is the moment value required to maintain the force balance when the rated load is placed in the car.
[0131] Step three, if the elevator is running, monitor the elevator speed feedback signal VF; otherwise, go to step two.
[0132] If VF=0, re-execute step 3;
[0133] Otherwise, the following calculations are performed:
[0134] If VF>0, then:
[0135] NI = RI - DI;
[0136] DI=DI / 2;
[0137] RI = RI - DI;
[0138] If VF<0, then:
[0139] NI=RI+DI;
[0140] DI=DI / 2;
[0141] RI=RI+DI;
[0142] Step 4, according to the value of the variable CN, assign a value to the torque compensation value CI:
[0143] If CN<1, then:
[0144] CI=RI;
[0145] o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More