

Method and device for motion transition of a multi-legged robot
A multi-legged robot and robot motion technology, which is applied in the field of multi-legged robot motion transition, can solve the problems of complex time-consuming and high price of terrain information collection equipment, achieve smooth and stable motion transition, and reduce technical complexity and cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
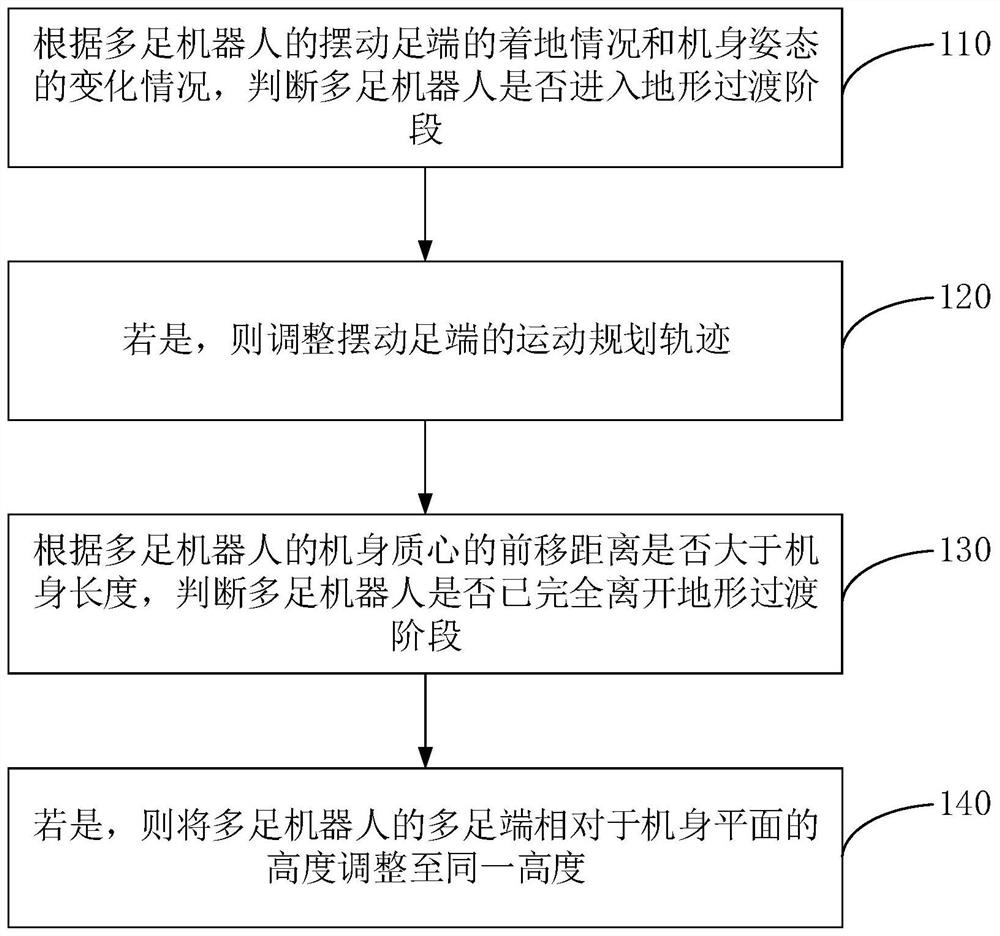
[0023] Figure 1a It is a flow chart of a method for motion transition of a multi-legged robot in Embodiment 1 of the present invention. This embodiment is applicable to the motion transition situation of a multi-legged robot between flat terrain and inclined terrain. The method can be performed by a multi-legged robot. Transition means to perform. In this embodiment, a quadruped robot is used as an example to illustrate the method, and the method may specifically include:
[0024] Step 110 , according to the landing condition of the swinging feet of the multi-leg robot and the change of body attitude, determine whether the multi-leg robot enters the terrain transition stage.
[0025] In this embodiment, an optional quadruped robot is taken as an example. The movement gaits of the quadruped robot mainly include crawling (walk) gait and trot (trot) gait, the walk gait is mainly used for low-speed static gait, and the trot gait In the gait, the impact between each foot end and ...
Embodiment 2
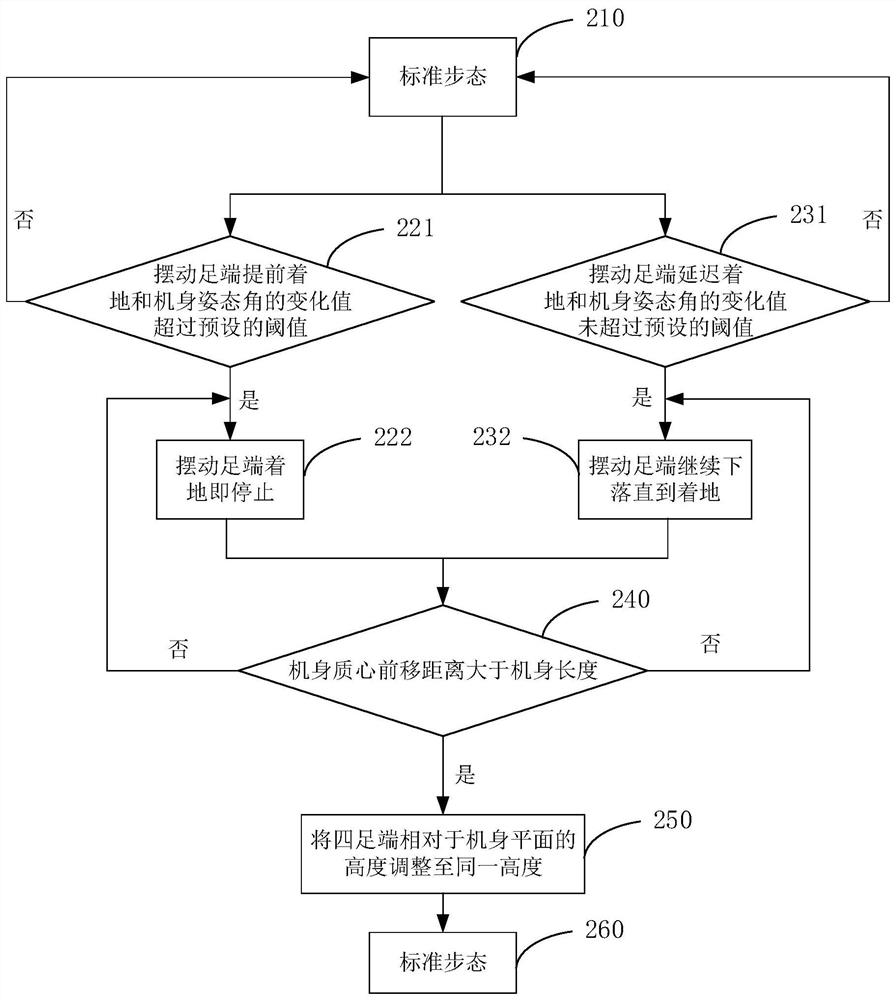
[0038] figure 2 It is a flow chart of a method for motion transition of a multi-legged robot in Embodiment 2 of the present invention. On the basis of the above-mentioned embodiments, this embodiment takes a quadruped robot as an example to describe the transition process of the quadruped robot from a flat terrain to an inclined terrain, and from an inclined terrain to a flat terrain. Correspondingly, the method in this embodiment specifically includes:
[0039] Step 210, the quadruped robot moves with a standard intermittent crawling gait.
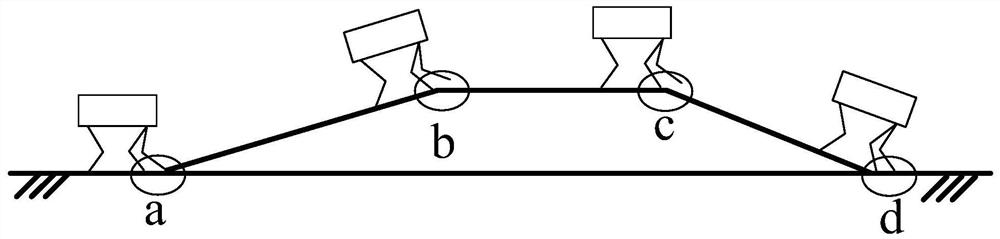
[0040] Specifically, see Figure 1b , a is the transition stage from flat terrain to slope terrain, and b is the transition stage from slope terrain to flat terrain. Before the quadruped robot enters the transition stage, that is, when it is on flat terrain or slope terrain, it moves with a standard intermittent crawling gait.
[0041] When the quadruped robot enters transition phase a, execute step 221; when enters transition phase b, ...
Embodiment 3
[0056] image 3 It is a schematic structural diagram of a multi-legged robot motion transition device in Embodiment 3 of the present invention. The device is configured in a multi-legged robot, including:
[0057] The transition judging module 310 is used for judging whether the multi-legged robot has entered the terrain transition stage according to the landing situation of the swing foot end of the multi-legged robot and the change of the fuselage attitude, wherein the terrain transition stage includes the transition from flat terrain to slope terrain phases and transition phases from sloped terrain to flat terrain;
[0058] The motion trajectory adjustment module 320 is used to adjust the motion planning trajectory of the swinging foot end if the multi-legged robot enters the terrain transition stage;
[0059] Leaving judging module 330, used to determine whether the multi-legged robot has completely left the terrain transition stage according to whether the forward distan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More