Monocular vision and IMU fused adaptive indoor positioning method
A monocular vision and indoor positioning technology, which is applied in the field of computer vision technology and information fusion, can solve the problems of large amount of calculation and difficult application, and achieve the effect of ensuring accuracy and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] The present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
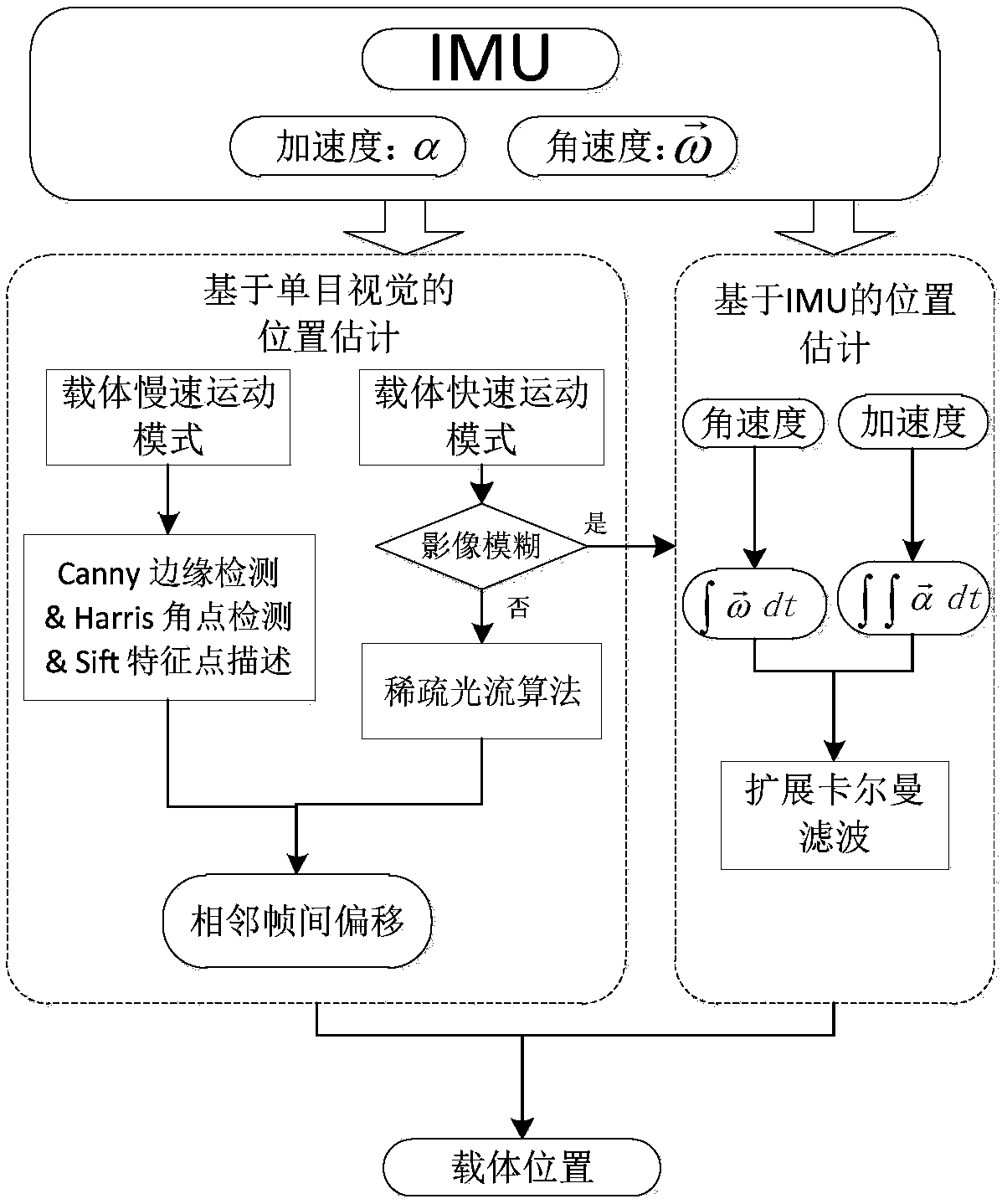
[0045] The present invention utilizes the acceleration and angular velocity of the IMU to judge the operating mode of the carrier, and adopts different visual-inertial positioning strategies according to the characteristics of each mode. In addition, the method of the present invention adopts a configuration mode in which the focal length of the camera is fixed and the lens is directed downward, which can effectively alleviate the problems of low positioning accuracy caused by blurred images and insufficient matching of feature quantities. The method of the invention has high positioning accuracy and fast calculation speed, and can be widely applied to the scene of indoor positioning of pedestrians.
[0046] The camera in the present invention is arranged in front of the carrier with the lens facing down and the focal length fixed. When the carr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com