

Inertial sensor and visual sensor data fusion algorithm
An inertial sensor and visual sensor technology, applied in the field of positioning, can solve the problems of high delay, low three-dimensional space coordinate frequency, inability to adapt to application scenarios with high three-dimensional space positioning delay and high frequency requirements, etc., to improve the output frequency, The effect of reducing positioning delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Hereinafter, the present invention will be described in detail.
[0038] Unless defined otherwise, all technical and scientific terms used in this application have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. All patents and publications mentioned in this application are hereby incorporated by reference.
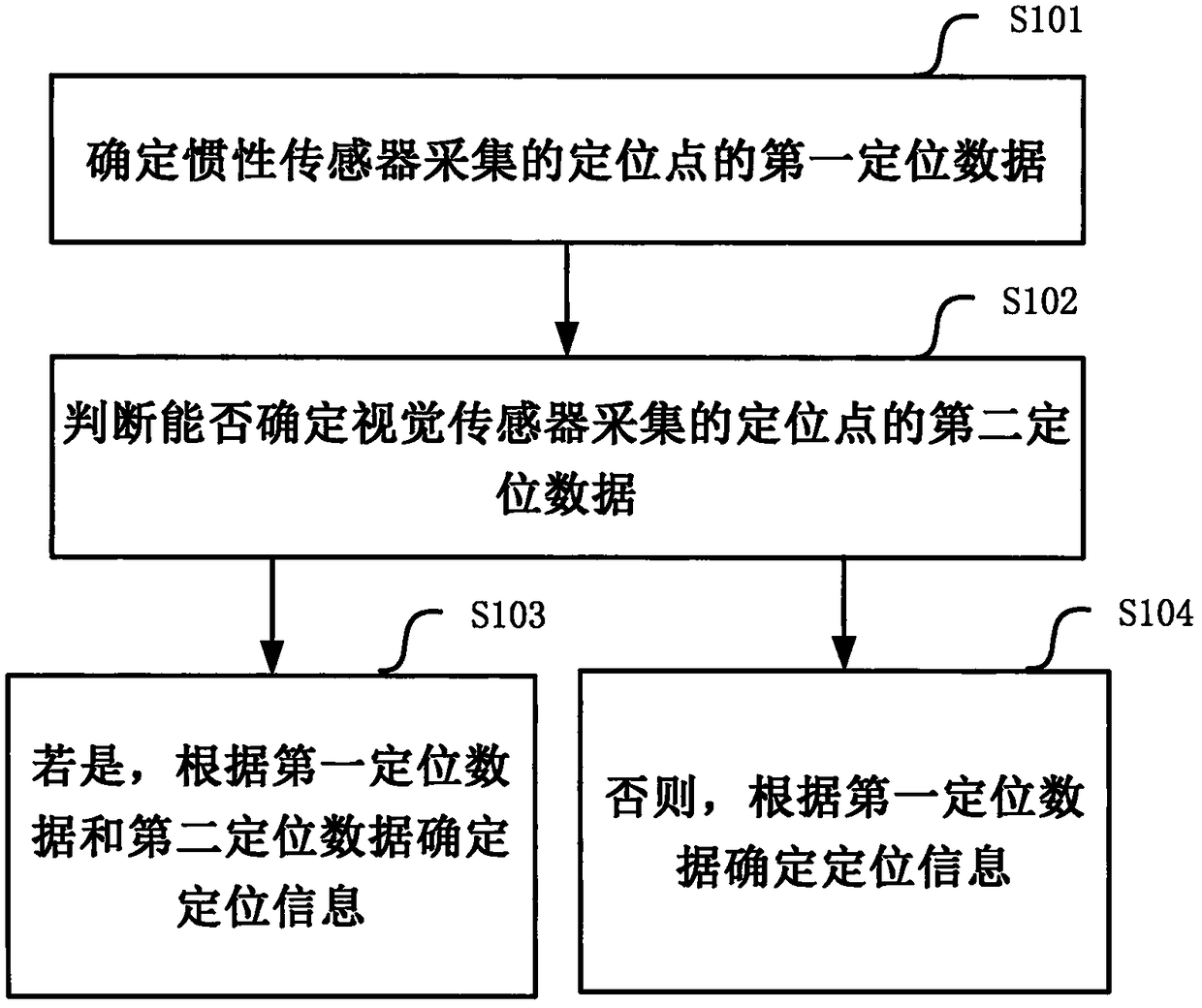
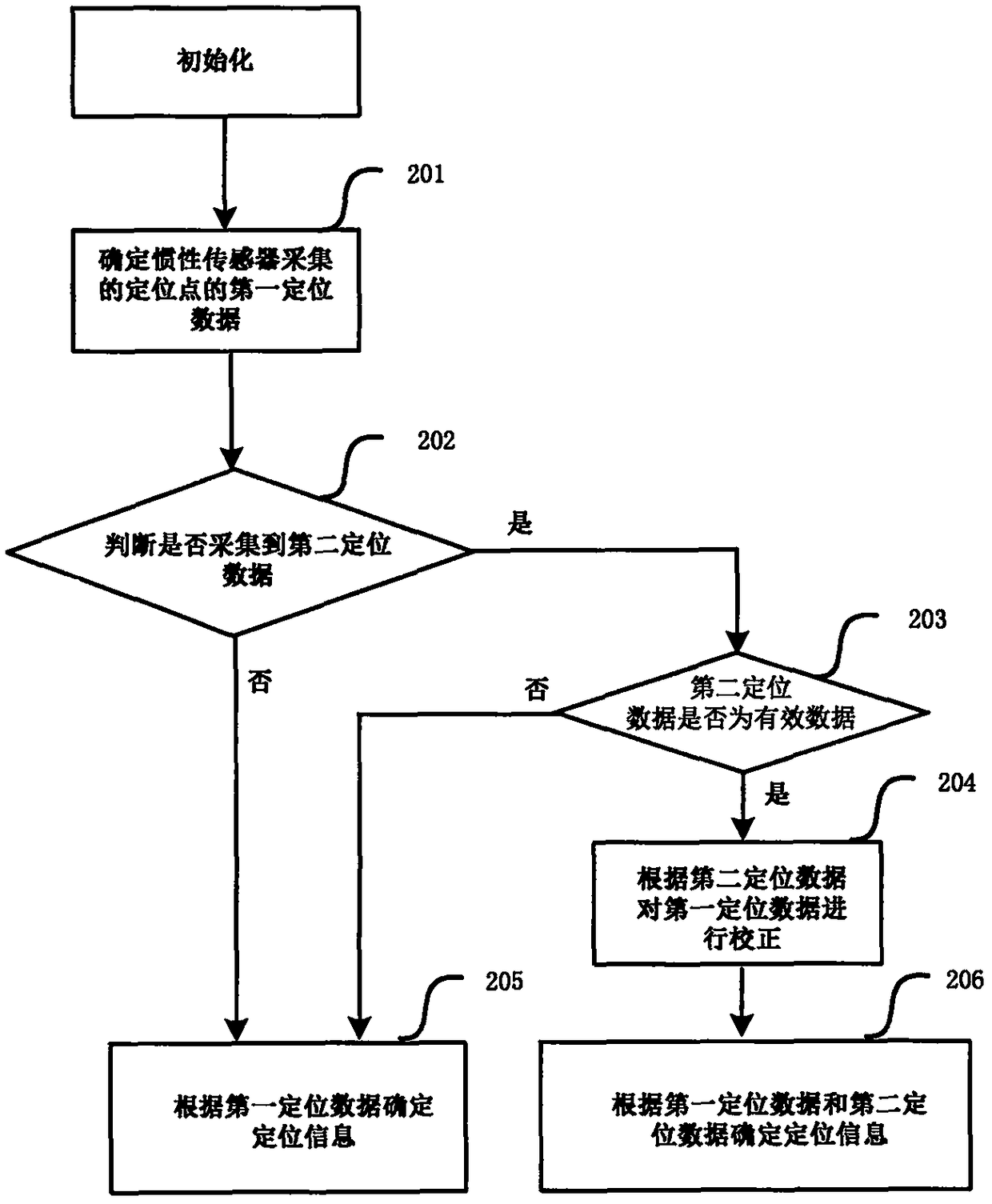
[0039] According to an inertial sensor and visual sensor data fusion algorithm involved in an embodiment of the present invention, the first positioning data of the positioning point collected by the inertial sensor and the second positioning data of the positioning point collected by the visual sensor perform the positioning information of the specific point In addition, the algorithm can also determine the positioning information of a specific point according to the first positioning data when the visual sensor does not collect the second positioning data, so that the positioning information can be dete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More