

Motion mapping method and motion mapping system of heterogeneous master and slave system
A mapping method and master-slave technology, applied in the motion mapping method and system field of heterogeneous master-slave systems, can solve the problems of not being able to take into account the end effector at the same time, the operator is prone to errors, and the user's remote operation is not intuitive, etc. Concise, algorithmically efficient, and easy-to-implement effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The specific embodiments of the present invention will be described in further detail below in conjunction with the drawings and embodiments. The following examples are used to illustrate the present invention, but not to limit the scope of the present invention.
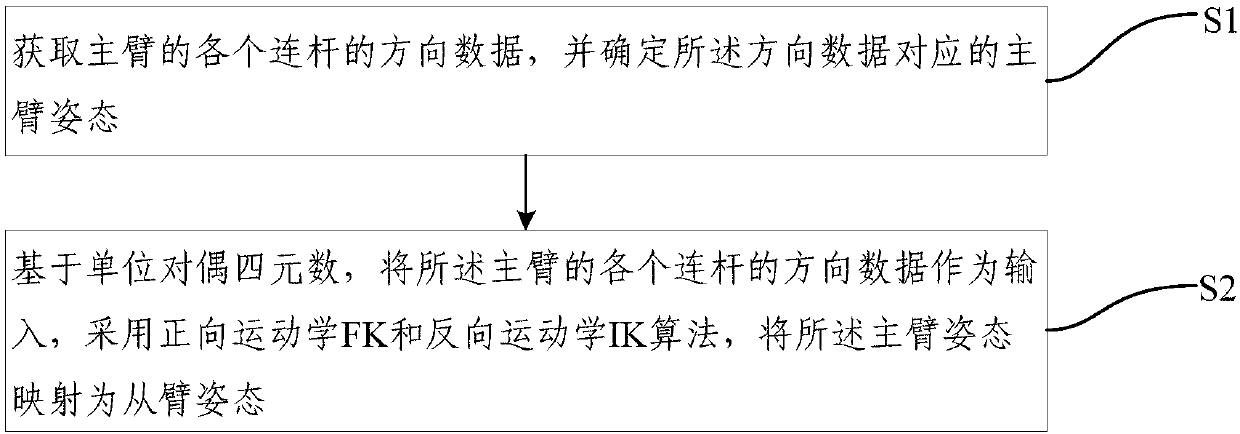
[0049] figure 1 It is a flowchart of a motion mapping method for a heterogeneous master-slave system provided by an embodiment of the present invention, such as figure 1 As shown, the method includes:
[0050] S1. Obtain the direction data of each link of the main arm, and determine the main arm posture corresponding to the direction data;
[0051] S2, based on the unit dual quaternion, take the direction data of each link of the master arm as input, and use forward kinematics FK and inverse kinematics IK algorithms to map the master arm posture to the slave arm posture.
[0052] It is understandable that the embodiment of the present invention is directed to a heterogeneous master-slave teleoperation system, and in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More