

Force control-based robot polishing trajectory estimation method
A technology of robots and robot arms, applied in the direction of program control, computer control, general control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0017] The specific implementation manner of the present invention will be described in further detail below by describing the best embodiment with reference to the accompanying drawings.
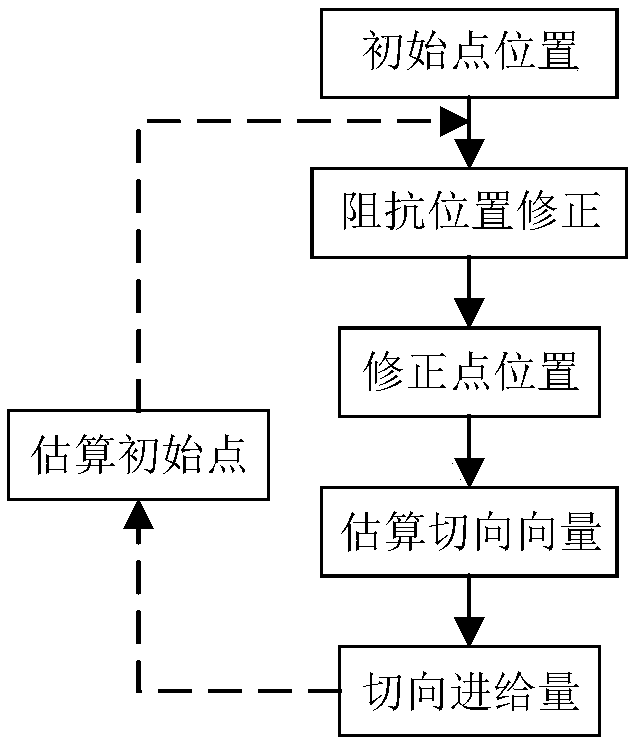
[0018] Such as figure 1 , the force sensor is used to collect the pressure between the grinding tool held by the robot grinding arm and the workpiece. The movement of the robot is controlled by the robot controller. The robot controller communicates with the host computer controller. The control system adopts a centralized control method, and the host computer controls The force sensor is connected to the force sensor to receive real-time force information; the robot controller, as a lower computer, sends real-time pose information to the upper computer controller, receives the pose information to modify the current trajectory, and controls the robot to perform grinding. The host computer controller corrects the position correction in the normal direction through force control according to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More