

Multi-degree of freedom adjustment structure for security robot
A technology for adjusting structures and robots, applied in manipulators, manufacturing tools, etc., can solve problems such as not being able to meet the working requirements of security robots, slow response speed, and difficult to control the stroke
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
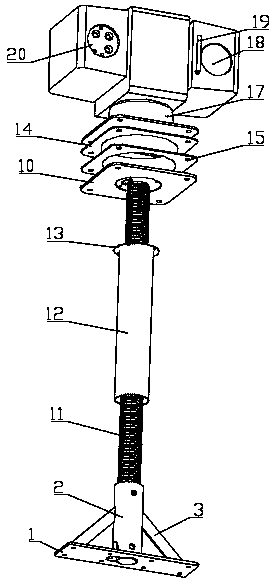
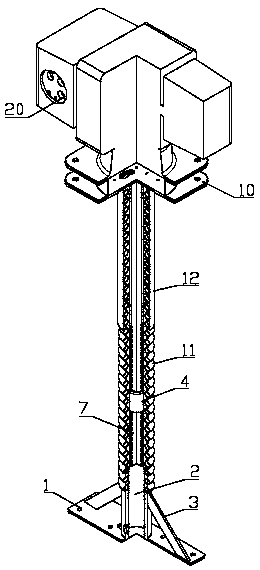
[0037] Such as Figure 3-4 As shown, the electric push rod includes a drive motor 4, a drive motor support tube 5, a worm 6, a lifting screw 7, and a travel switch 8. The drive motor support tube 5 is arranged in the electric push rod, and the drive motor support tube 5 The installation consists of a driving motor 4, the output shaft of the driving motor 4 is connected with the worm 6, the worm 6 is connected with the lifting screw 7, the travel switch 8 is arranged at the end of the driving motor support tube 5, and the travel switch 8 is controlled by an external controller 9 is connected with the driving motor 4, and receives the signal sent by the travel switch 8 through the external controller 9. The external controller 9 controls the forward rotation or reverse rotation of the driving motor 4, and the driving motor 4 rotates to drive the worm 6 on the supporting rod of the driving motor 4. Moving up, the worm 6 rotates to drive the lifting screw 7 to move, realizing the ...
Embodiment 2
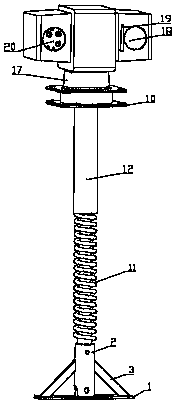
[0041] Such as Figure 5 As shown, on the basis of Embodiment 1, the multi-degree-of-freedom adjustment of the security robot is realized by adding the electric pan / tilt 17 and the two-degree-of-freedom adjustment of the camera. When the electric push rod moves up and down, the camera moves according to It is necessary to perform circular or pitch motion synchronously. When the pan / tilt 17 receives the up and down action voltage from the built-in controller 21, the vertical motor rotates, and the vertical transmission wheel is driven to rotate through the reduction box; when it receives the left and right action voltage When voltage is applied, the horizontal motor rotates and drives the horizontal gear plate at the bottom of the cloud platform 17 to rotate through the reduction box. The cloud platform 17 is provided with a vertical stop bolt, and the cloud platform 17 realizes the limit function by two micro switches respectively. When the preset limit bolt is reached, the mi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More