

A method for task allocation and route planning of unmanned aerial vehicles
A technology for route planning and task assignment, applied in vehicle position/route/altitude control, instruments, three-dimensional position/course control, etc., can solve problems such as difficulties in establishing mathematical models and complex track search algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
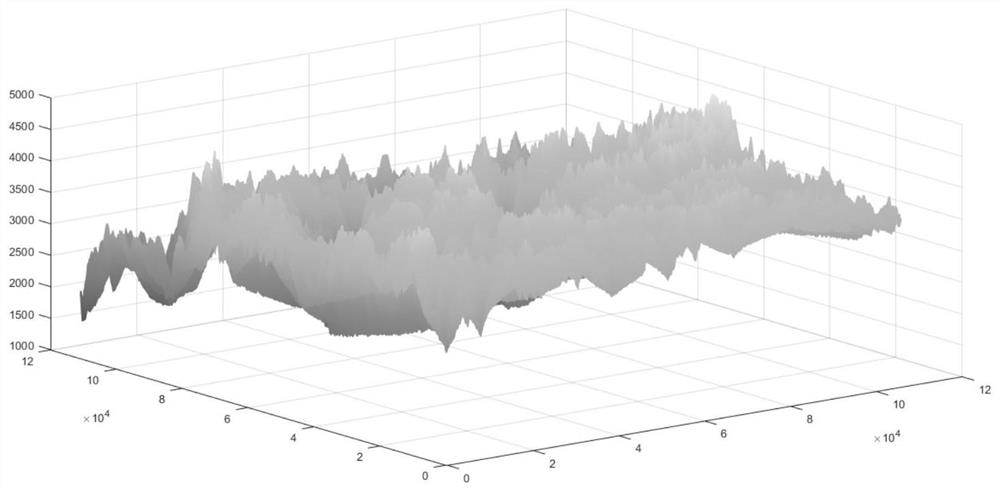
[0088] On August 8, 2017, a magnitude 7.0 earthquake occurred in Jiuzhaigou County, Aba Prefecture, Sichuan Province, causing irreparable casualties and major property losses. In the three-dimensional coordinates of the disaster area (X, Y axes indicate the relative position, Z axis is the altitude of the coordinates), UAV base H, and give the coordinates of the five areas A, B, C, D, E that need to be inspected , through UAV route optimization and task allocation methods, the UAV cruise mission is planned. figure 1 A topographic map of the earthquake zone. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More