

Indoor visual navigation unmanned aerial vehicle cluster flight control system and method
A flight control system and flight control technology, applied in the direction of control/regulation system, three-dimensional position/course control, non-electric variable control, etc., can solve problems such as inability to locate, cumbersome operation, and loss of control of the fleet
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
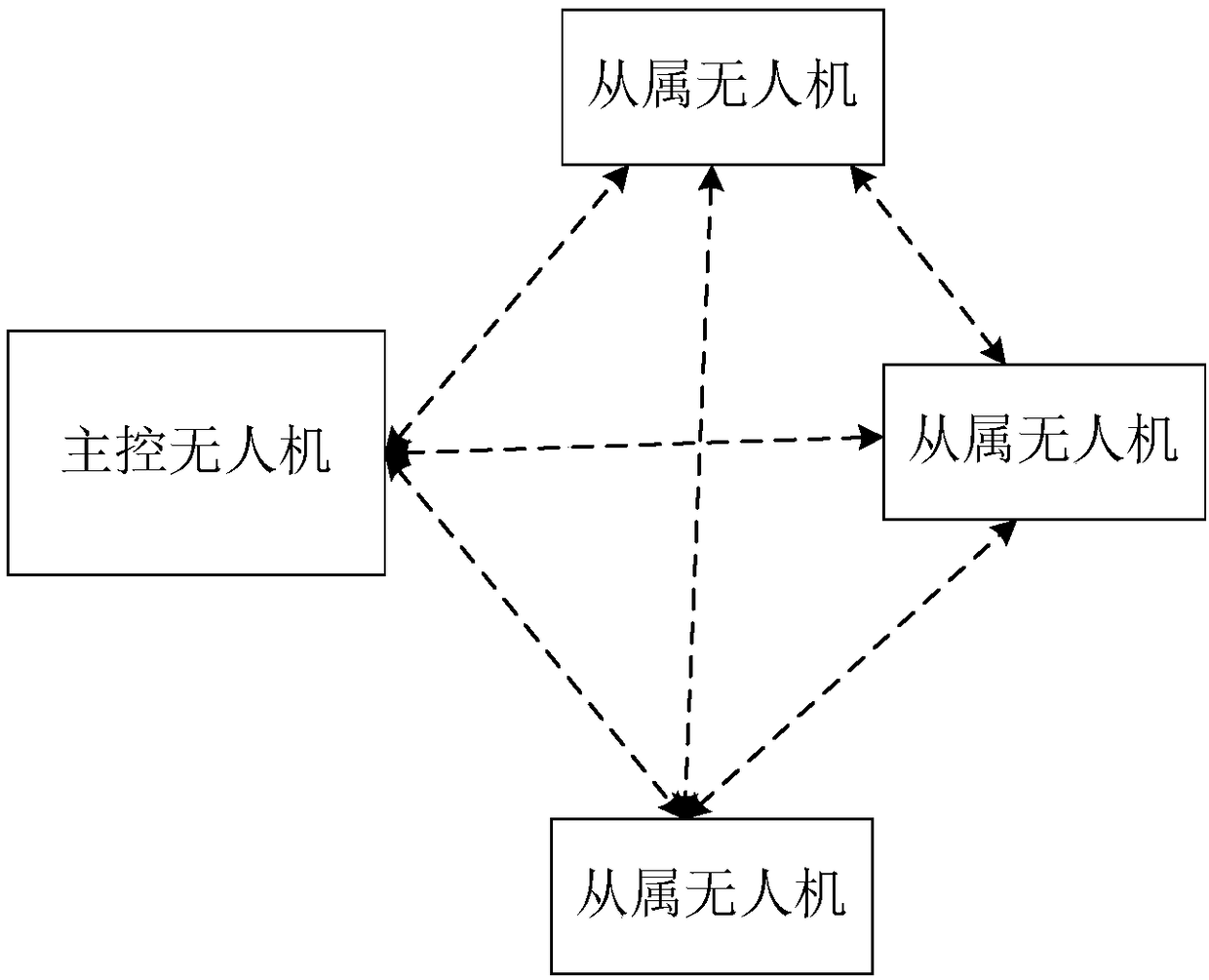
[0046] figure 1 It is a structural schematic diagram of an indoor visual navigation UAV cluster flight control system of the present invention.
[0047] Specifically, the indoor visual navigation UAV swarm flight control system includes at least two UAVs, all of which are flying indoors, such as in stadiums, shopping malls, exhibition halls, etc. Preferably, the drone can be a multi-rotor drone, such as a quadrotor drone. Each UAV has the ability to fly autonomously, and can perform corresponding flight tasks according to different flight programs stored in it, and the flight control program needs to be written into the UAV in advance. UAVs transmit information through short-range wireless communication, such as Bluet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More