

Intelligent mobile robot visual navigation system and method in narrow space
A mobile robot and space intelligence technology, applied in the field of visual navigation, can solve problems such as unrecognizable obstacles and target objects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The objects and functions of the present invention and methods for achieving the objects and functions will be clarified by referring to the exemplary embodiments. However, the present invention is not limited to the exemplary embodiments disclosed below; it can be implemented in various forms. The essence of the description is only to help those skilled in the relevant art comprehensively understand the specific details of the present invention.
[0031] Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings. In the drawings, the same reference numerals represent the same or similar components, or the same or similar steps.
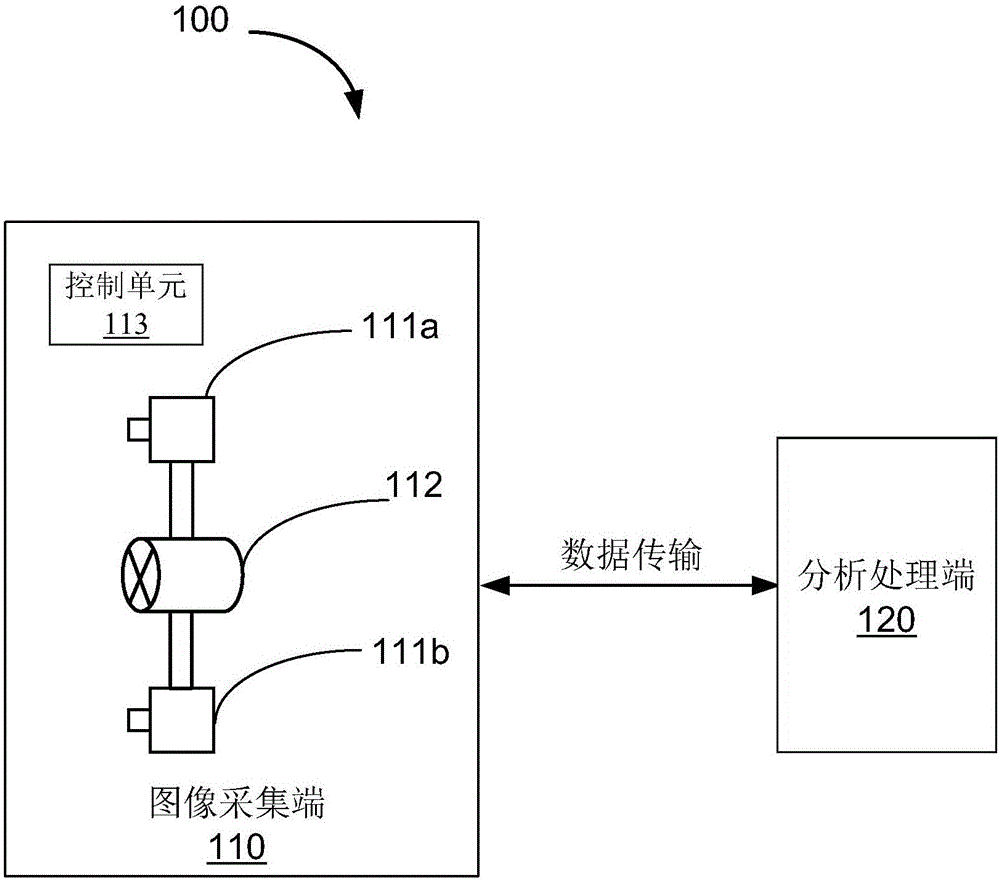
[0032] figure 1 It schematically shows the block diagram of the narrow space intelligent mobile robot vision navigation system of the present invention. like figure 1 As shown, the narrow space intelligent mobile robot visual navigation system 100 of the present invention includes an ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More