

Unmanned-ship speed and uncertainty estimation system and design method
A technology of uncertainty and design method, applied in the field of speed and uncertainty estimation system, can solve problems such as increasing the difficulty of practical engineering implementation, control errors, errors, and unfavorable precise control of small unmanned ships
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
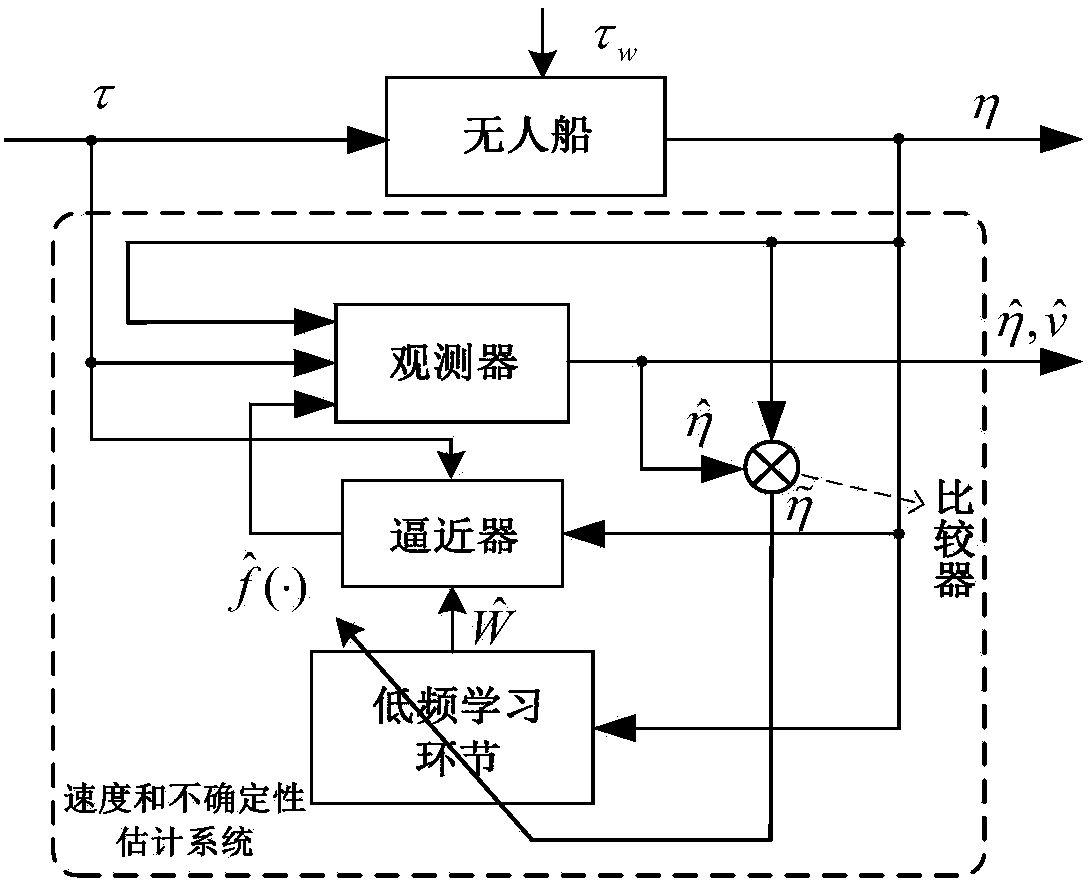
[0053] The unmanned ship speed and uncertainty estimation system involved in the present invention are as attached figure 1 shown. The state observation of a specific unmanned ship is carried out below, and the present invention is further described by taking this as an example, wherein the specific parameters of the unmanned ship model are as follows:
[0054]
[0055]
[0056]
[0057] The unmanned ship is made to move in a curve under the action of external disturbance and control torque, and the control vector τ and position vector η are used as the input of the unmanned ship speed and uncertainty estimation system. The system structure satisfies formulas (4)-(10), and the specific control parameters are as follows:
[0058] K 1 =diag{60,60,60},K 2 =diag{1200,1200,1200}, Γ=8000,Γ f =10,k W =0.001
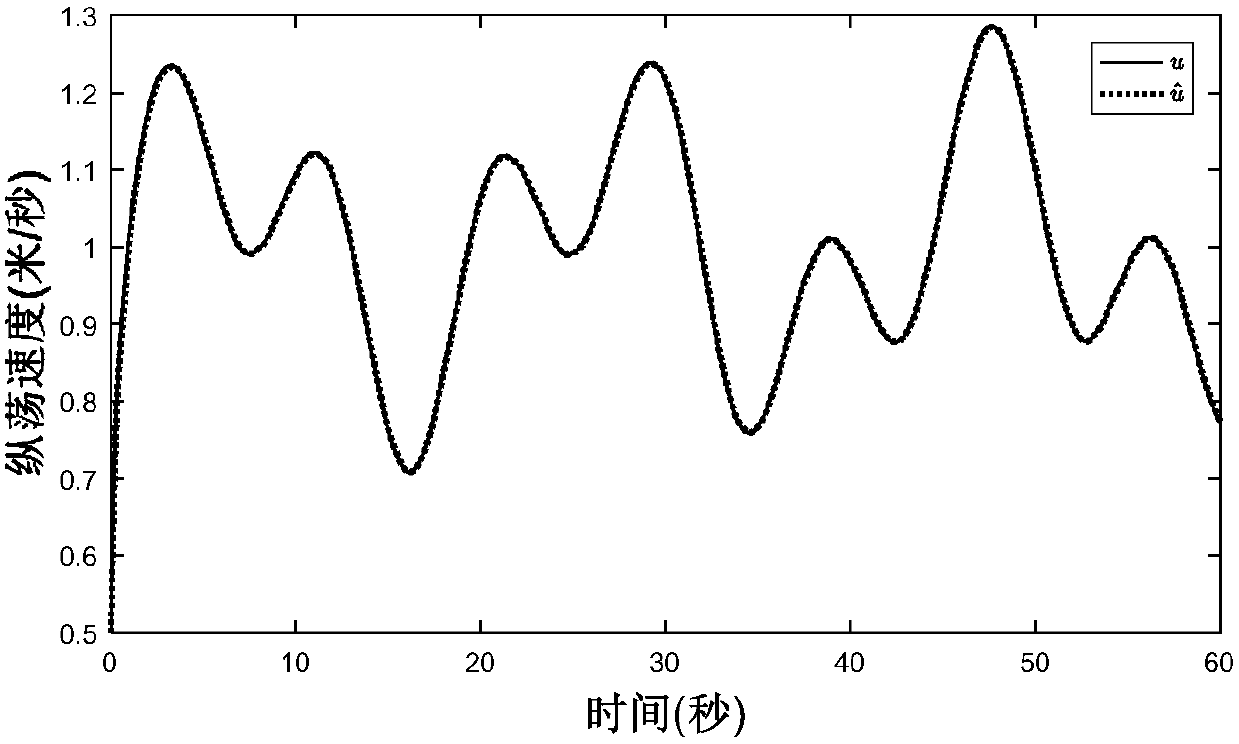
[0059] Simulation results such as Figure 3-8 shown. Figure 3-5 It is the comparison of the actual surge velocity, sway velocity, and yaw angular velocity of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More