

Robot navigation device and system based on stereoscopic vision matching
A technology of stereo vision matching and navigation device, which is applied in the field of robot navigation, can solve the problem of not having a global vision of detection, and achieve the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
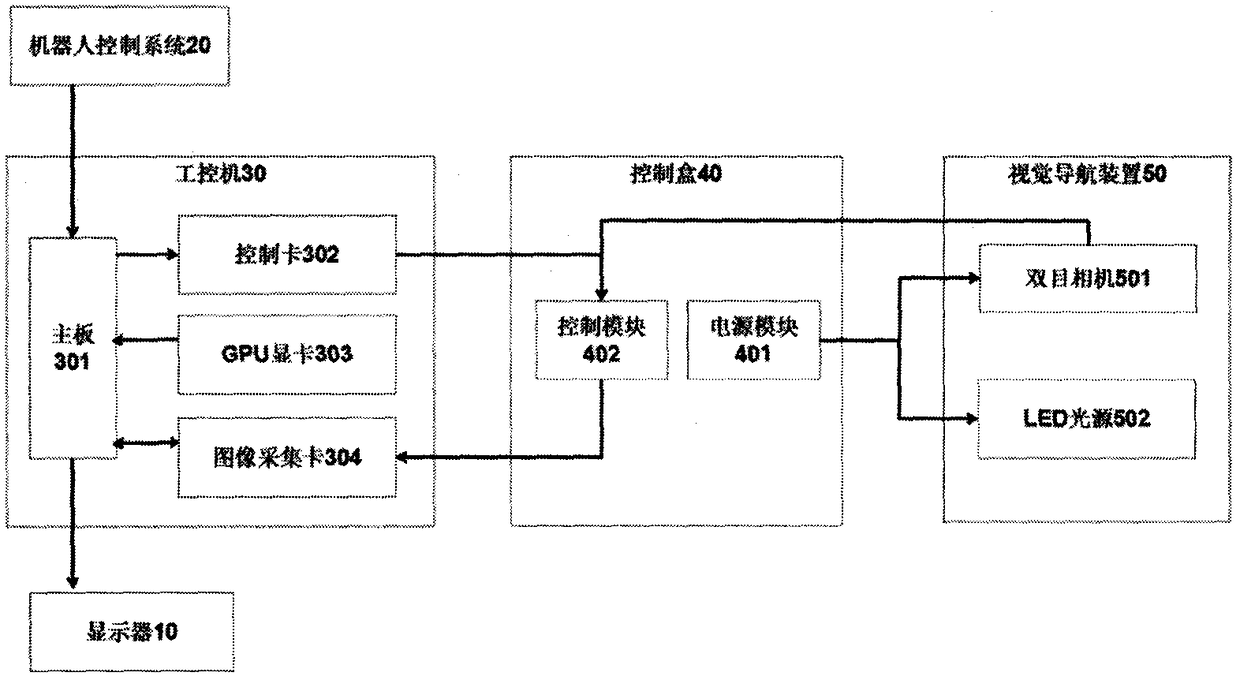
[0024] see figure 1 , a robot navigation device based on stereo vision matching in an embodiment of the present invention, the device includes: a display 10, a robot control system 20, an industrial computer 30, a control box 40, and a visual navigation device 50; wherein the industrial computer 30 includes Mainboard 301, control card 302, GPU graphics card 303, image acquisition card 304; Described visual navigation device 50 comprises binocular camera 501, LED light source 502; Described control box 40 comprises power supply module 401 and control module 402; Described robot control System 20 links to each other with industrial computer 30, and mainboard 301 in described industrial computer 30 is connected with described display 10, control card 302, GPU graphics card 303, image acquisition card 304 respectively; Described control box 40 is connected with control card 302, image acquisition The card 304, the binocular camera 501, and the LED light source 502 are connected. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More