

Robot moving method and device
A mobile device and robot technology, applied in the field of robots, can solve the problem that robots cannot accurately move users, and achieve the effect of improving user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
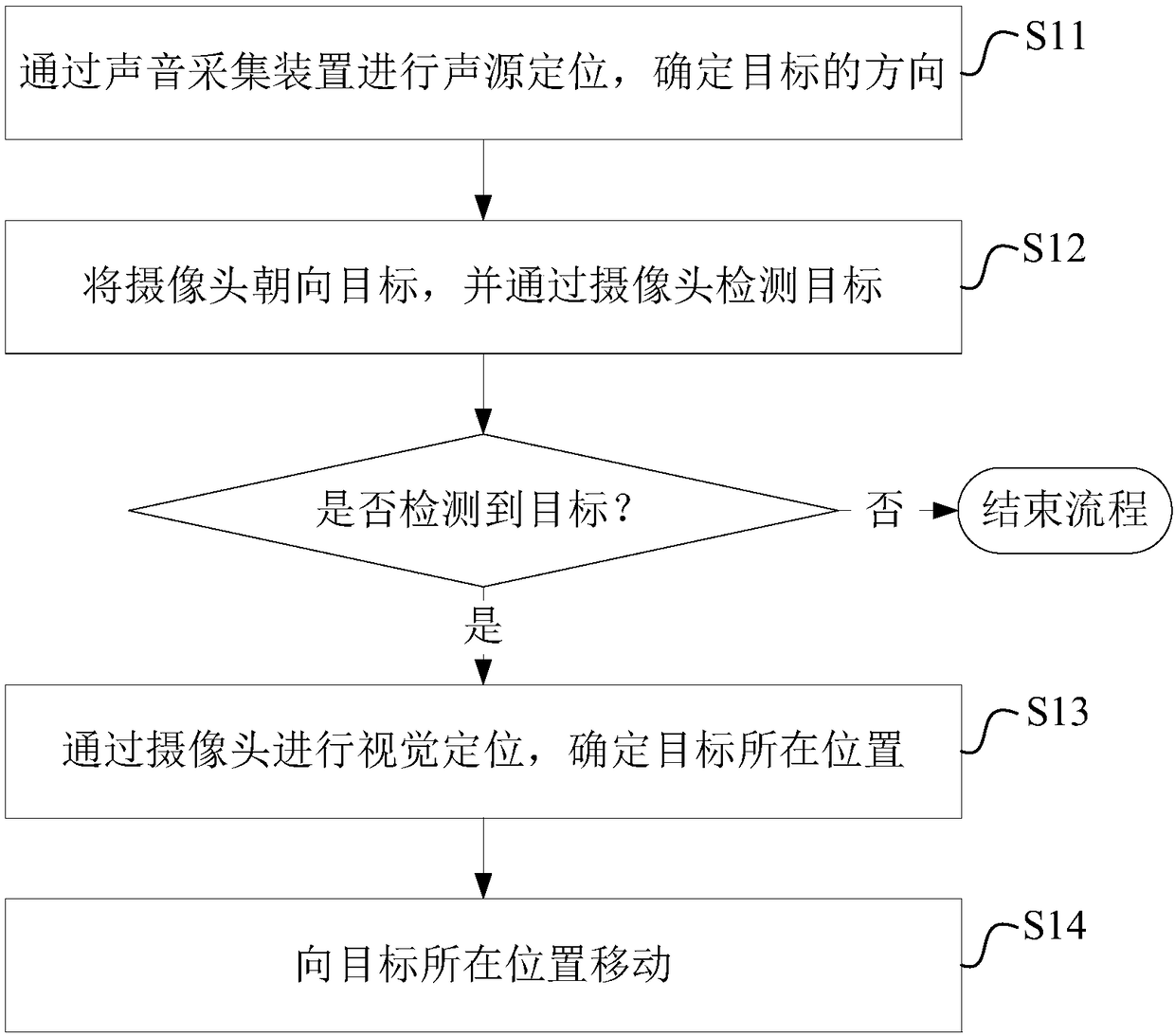
[0079] Reference figure 1 , The first embodiment of the robot movement method of the present invention is proposed. The method includes the following steps:
[0080] S11. Perform sound source localization through the sound collection device to determine the direction of the target.
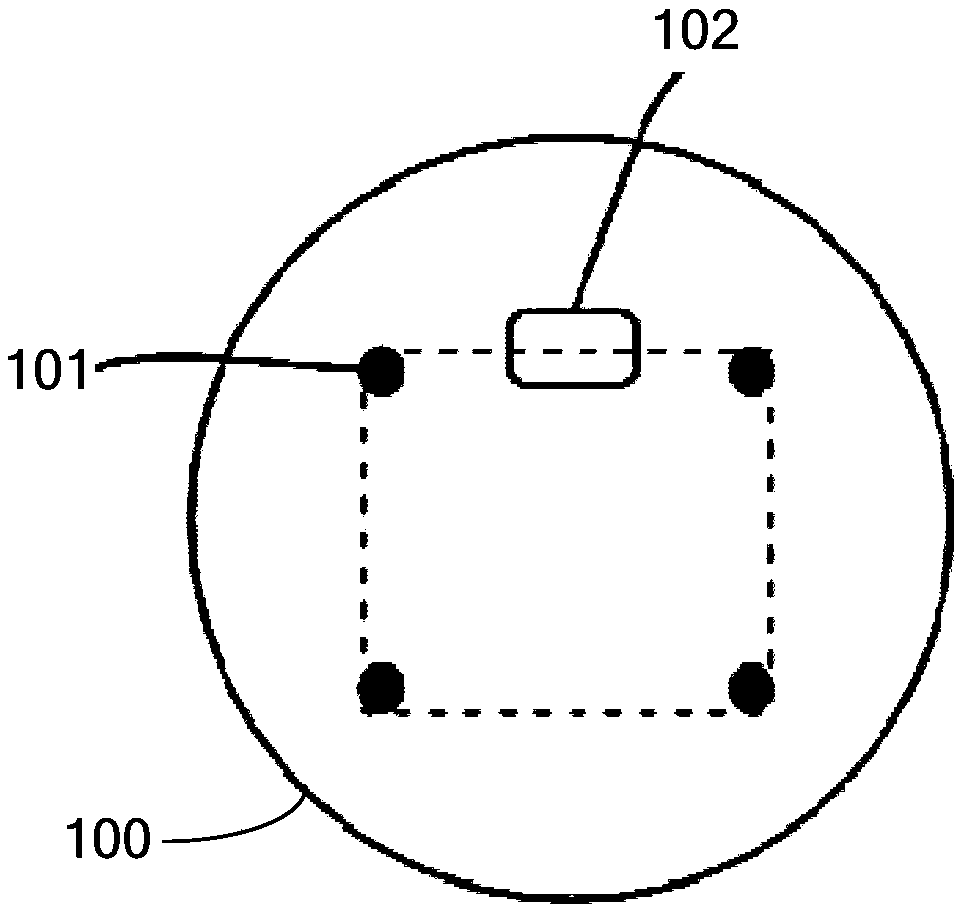
[0081] The sound collection device in the embodiment of the present invention is preferably a microphone array, such as figure 2 As shown, the cleaning robot 100 is provided with a microphone array composed of four microphones 101 and a camera 102. The sweeping robot uses the microphone array to collect the sound from the sound source, and uses the sound source localization technology to locate the sound source, thereby determining the direction of the sound source, which is the target. The sound source localization technology is a relatively mature existing technology and will not be repeated here.
[0082] The target here mainly refers to people (users), of course, it can also be other sound-producin...
no. 2 example
[0097] Reference Figure 4 , A second embodiment of the robot movement method of the present invention is proposed, and the method includes the following steps:
[0098] S21: Perform sound source localization through the sound collection device and determine the direction of the target.
[0099] S22. Point the camera toward the target, and detect the target through the camera. It is judged whether the target is detected, when the target is not detected, go to step S23; when the target is detected, go to step S24.
[0100] S23. Avoid obstacles blocking the target until the target is detected.
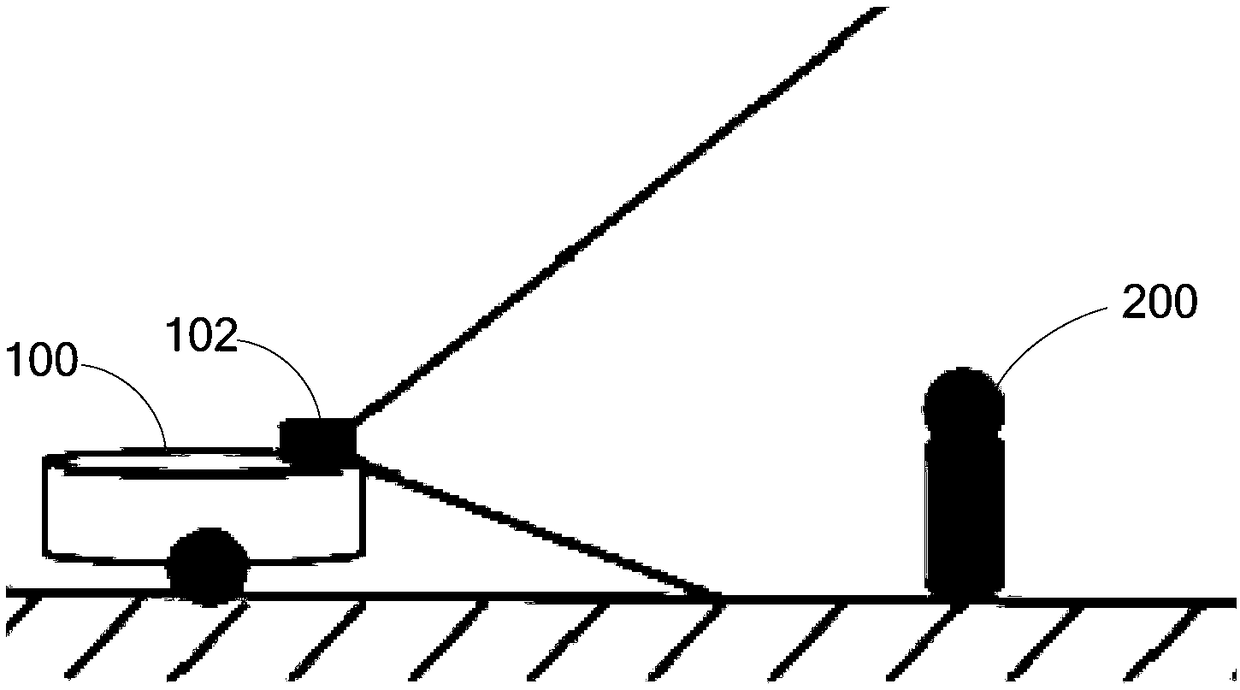
[0101] S24. Perform visual positioning through the camera to determine the location of the target.
[0102] S25. Move to the location of the target.
[0103] Considering that there may be obstacles between the sweeping robot and the target, when the sweeping robot does not detect the target in situ, it means that the field of view of the sweeping robot's camera is blocked by the obstacle. Therefor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More