

Rehabilitation training robot for lower limbs of human bodies
A technology for rehabilitation training and robotics, applied in muscle training equipment, gymnastics equipment, equipment to help people walk, etc., can solve the problems that the lower limb training aids cannot move independently, cannot completely restore the walking environment, and patients are difficult to maintain body balance. Achieve the effects of improving the effect of rehabilitation treatment, facilitating the protection of encoders, and improving the safety of equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below with reference to the drawings and embodiments, and the embodiments are used to explain the present invention, rather than limit the protection scope of the present invention.
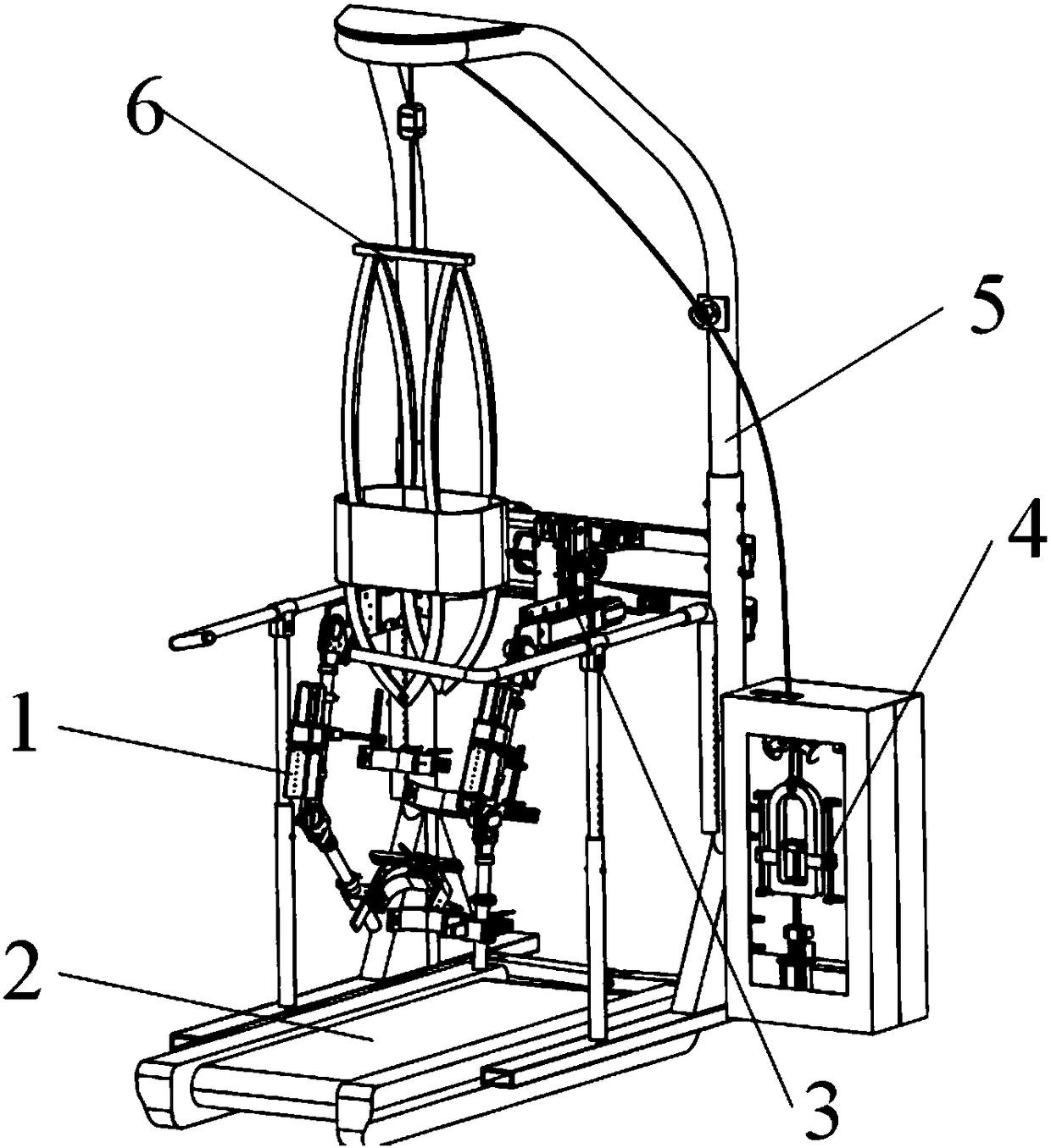
[0041] see figure 1 , the present invention provides a wearable exoskeleton robot for lower limb rehabilitation training, which is used for lower limb rehabilitation training for patients with central nervous system injuries such as cerebral apoplexy and spinal injury, including a gait training system, a waist connection device 3 and a suspension reducing weight. Weight system, gait training system uses two exoskeletons to drive the patient's lower limbs to train according to the trajectory of normal human walking, and the weight loss system drives the patient to move up and down in the vertical plane according to the trajectory of the center of gravity under the gait training trajectory, and provides the patient with Provide a certain weig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More