

Motion trajectory planning method and device, robot and storage medium
A motion trajectory and trajectory planning technology, applied in the field of robotics, can solve problems such as large amount of calculation, high complexity, and affecting the real-time performance of robot motion operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
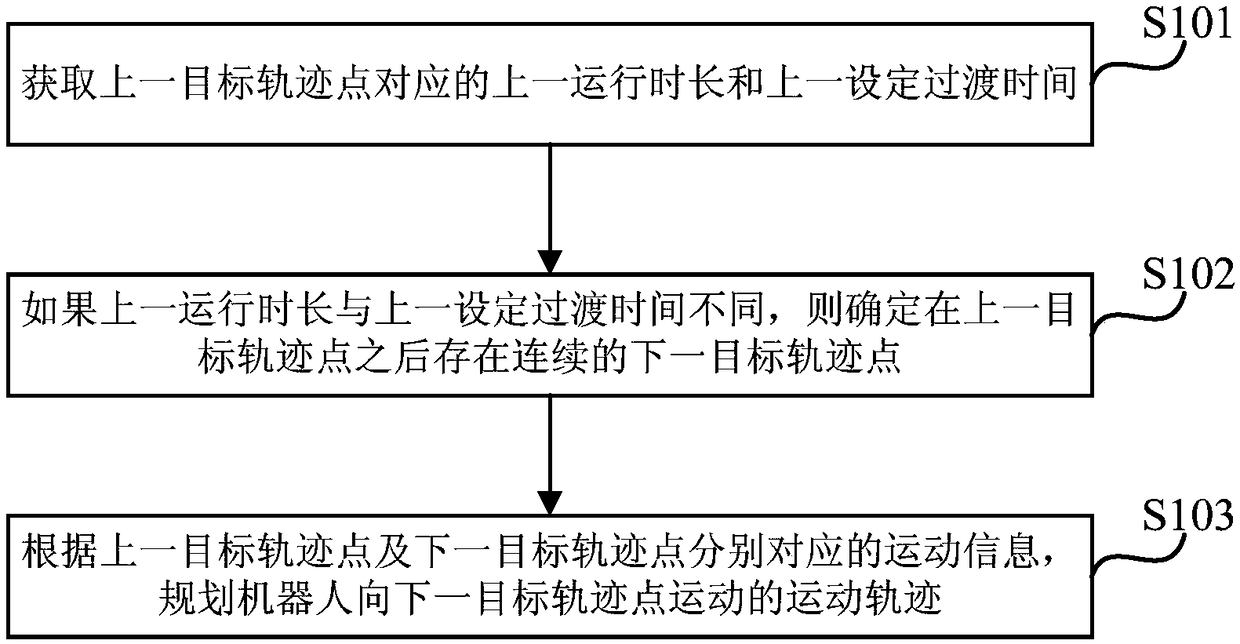
[0027] figure 1 It is a schematic flowchart of a motion trajectory planning method provided by Embodiment 1 of the present invention. This method is suitable for planning the motion trajectory of a robot during point-to-point operation. The method can be executed by a motion trajectory planning device, wherein the device can be controlled by software and / or hardware implementation, and generally integrated on the robot.
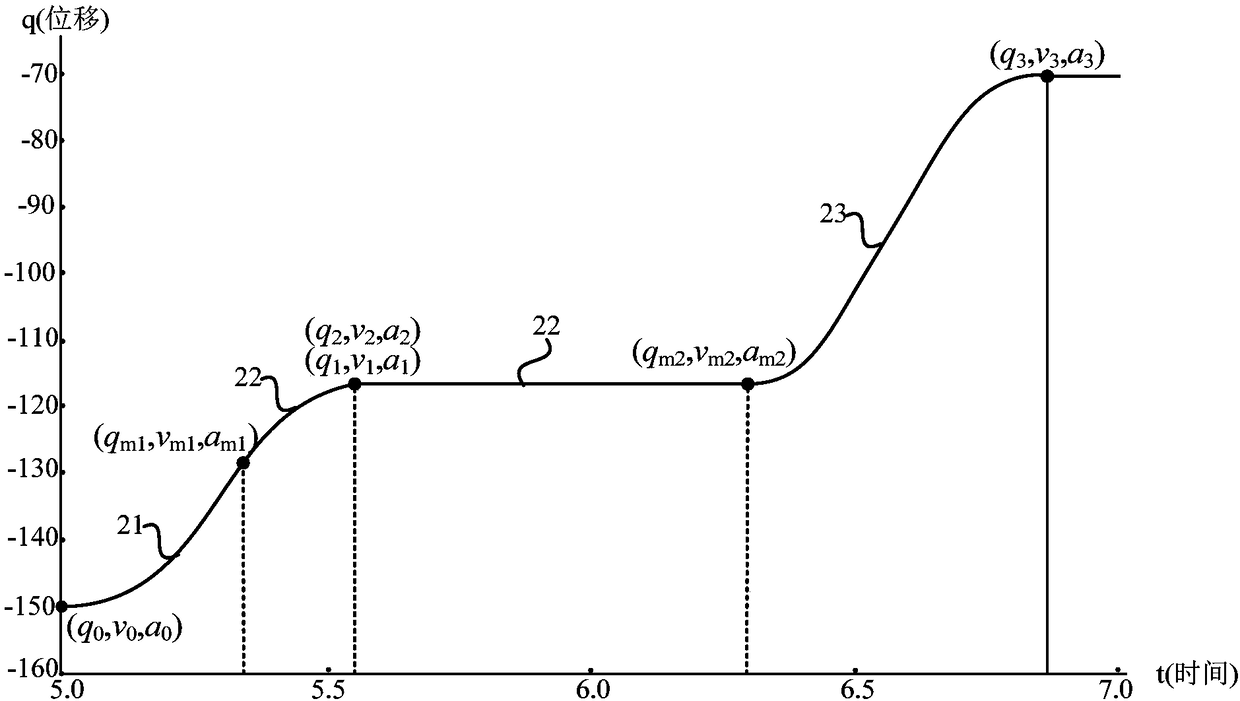
[0028] It should be noted that, the application scenario of this embodiment can be to plan the motion track between points of the robot when it is necessary to control the robot (which can be an industrial robot) to complete the operation from the current track point to the target track point, wherein, the robot It is usually necessary to complete continuous operations between multiple adjacent trajectory points. Therefore, it is necessary to plan a motion trajectory segment that can control the robot to smoothly connect each trajectory point. The motion tra...
Embodiment 2
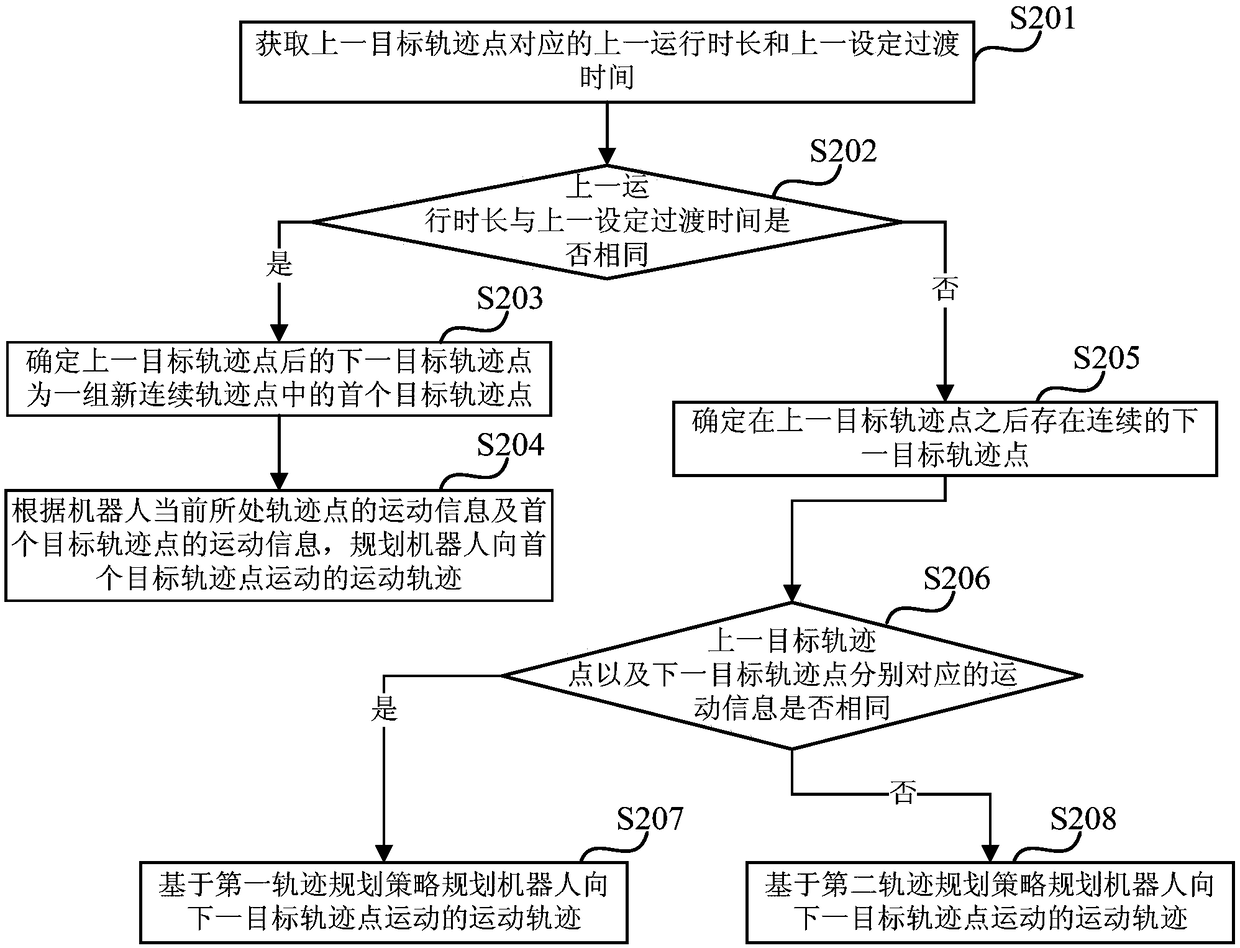
[0045] Figure 2a It is a schematic flowchart of a motion trajectory planning method provided by Embodiment 2 of the present invention. The embodiment of the present invention is optimized on the basis of the above embodiment. In this embodiment, the method is further optimized: if the last running time is the same as the last set transition time, then determine the last target The next target track point after the track point is the first target track point in a group of new continuous track points; according to the motion information of the track point where the robot is currently located and the motion information of the first target track point, the planned The trajectory of the robot moving to the first target trajectory point.
[0046] Further, in this embodiment, according to the motion information corresponding to the last target track point and the next target track point respectively, plan the motion track of the robot moving to the next target track point, and the ...
Embodiment 3
[0094] image 3 It is a structural block diagram of a motion trajectory planning device provided by Embodiment 3 of the present invention. The device is suitable for planning the motion trajectory of the robot during point-to-point operation, the device can be realized by software and / or hardware, and is generally integrated on the robot. Such as image 3 As shown, the device includes: an information acquisition module 31 , a first determination module 32 and a first planning module 33 .
[0095] Wherein, the information acquisition module 31 is used to acquire the last running time corresponding to the last target trajectory point and the last set transition time;
[0096] The first determination module 32 is configured to determine that there is a continuous next target track point after the last target track point when the last running duration is different from the last set transition time;
[0097]The first planning module 33 is configured to plan the movement trajecto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More