Multi-rotor unmanned aerial vehicle emergency stop device and method
A multi-rotor unmanned aerial vehicle, emergency shutdown technology, applied in the field of unmanned aerial vehicles, can solve the problems of potential safety hazards and easy flipping of the body, and achieve the effect of preventing continuous high-speed rotation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0039] Reference figure 1 This embodiment provides an emergency shutdown device for a multi-rotor drone, which includes several speed sensors, a number of controllable switches, and independent control modules; wherein, a number of speed sensors are installed in the rotor assembly of the multi-rotor drone. To detect the rotation speed of the rotor assembly and output the rotation speed signal (V1-V4); the controllable switch is a normally closed switch, such as a magnetic latching relay, which is connected in series between the rotor assembly and the controller of the multi-rotor UAV; The sensor and several controllable switches are electrically connected with the independent control module; the independent control module is installed in the body of the multi-rotor drone.
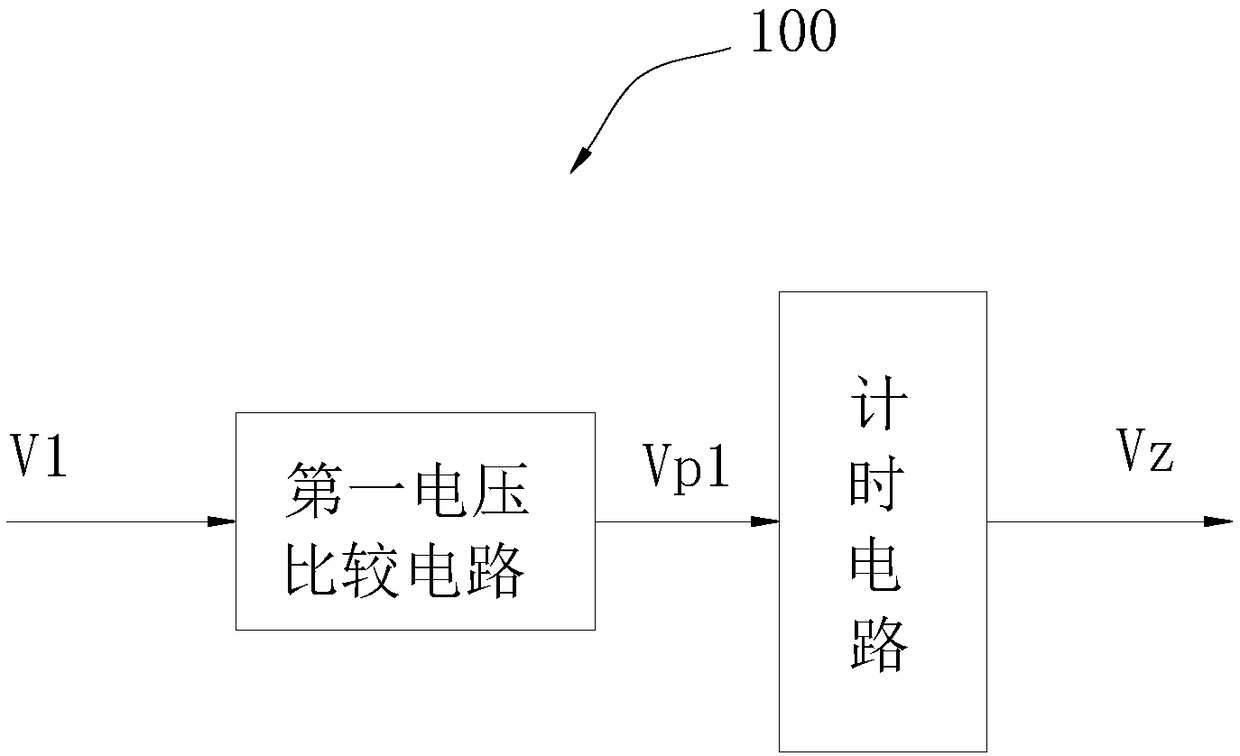
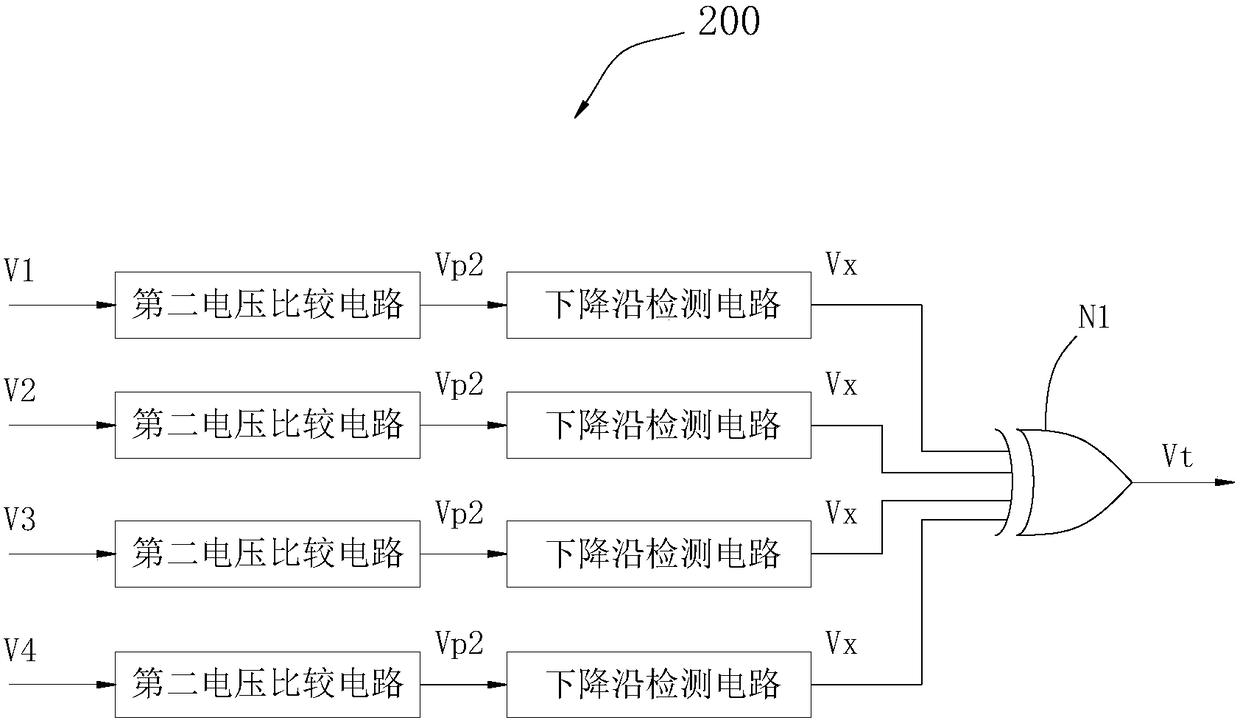
[0040] The independent control module includes a flight detection circuit 100, a synchronization detection circuit 200, and a drive circuit 300. Among them, the flight detection circuit 100 has an input termina...
Embodiment 2
[0046] Based on the first embodiment, this embodiment provides an emergency shutdown method for a multi-rotor drone, including:
[0047] S1. Determine whether the multi-rotor drone enters the flying state according to the output signal of one of the speed sensors, and output a corresponding state detection signal.
[0048] Specifically, when the time for which the output signal of one of the rotational speed sensors exceeds the first preset value exceeds the preset time period, it is determined that the flight state is entered.
[0049] S2. Output a corresponding synchronization detection signal according to the change of the output signal of each speed sensor; where the change refers to whether the change of the output signal of each speed sensor is synchronized.
[0050] S3. Perform a logical operation on the received state detection signal and the synchronization detection signal according to the preset operation logic, and control the controllable switch according to the operation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More