Hi-lock nut installation robot end actuator and hi-lock nut installation method thereof
An end-effector and high-lock nut technology, applied in metal processing, metal processing equipment, manufacturing tools, etc., can solve the problems of low installation efficiency, high labor intensity, and high requirements for the openness of assembly space to ensure reliability. , the effect of high degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with accompanying drawing.
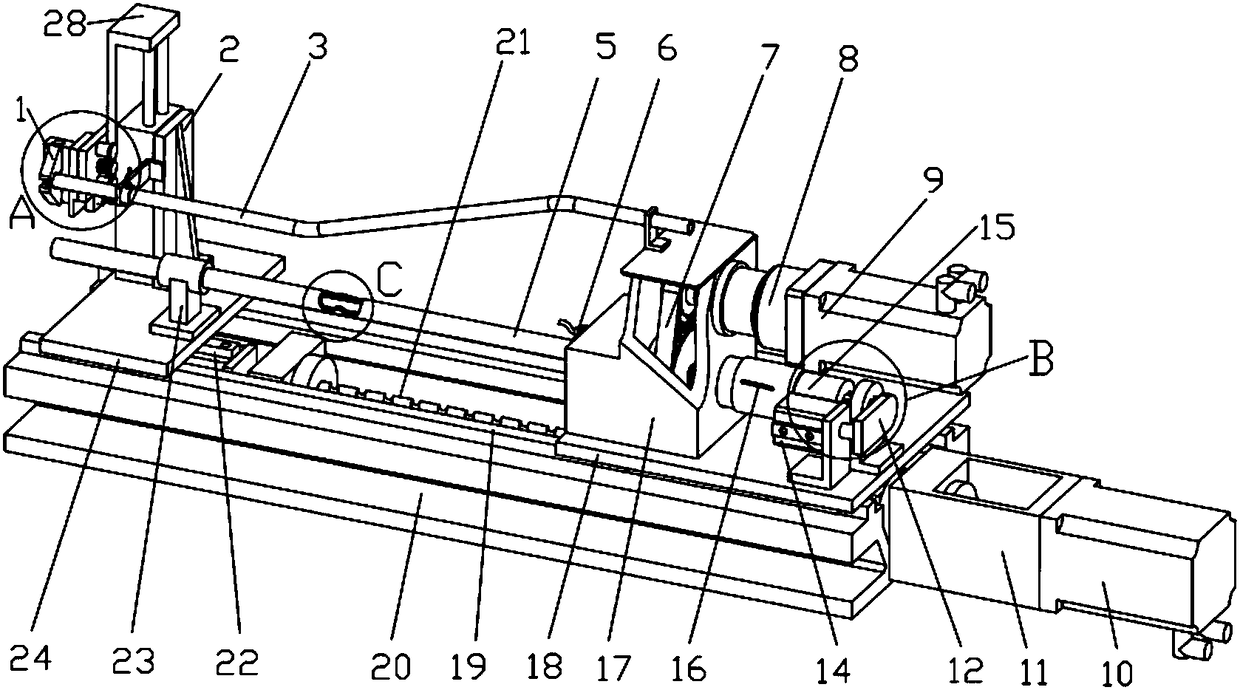
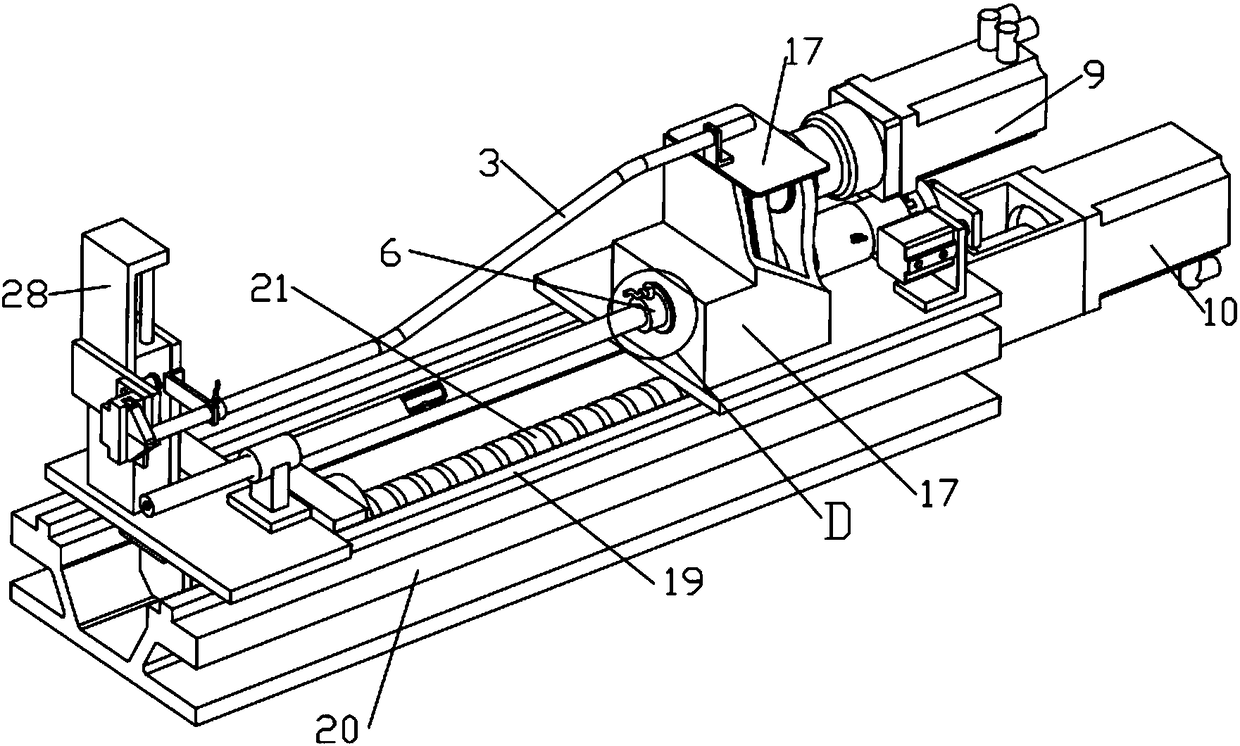
[0044] like figure 1 and 2 As shown, the high-lock nut installation robot end effector includes a base 20, a feeding device, a mounting device and a nut delivery device. The feeding device includes a feeding servo motor 10 , a connecting seat 11 , a guide rail 19 , a ball screw 21 and a rear sliding seat 18 . Two guide rails 19 arranged in parallel are all fixed on the base 20 . The ball screw 21 is supported on the base 20 . Back sliding seat 18 and guide rail 19 constitute sliding pair. The nut and the ball screw mandrel 21 fixed on the back sliding seat 18 form a helical pair. The connection base 11 is fixed on one end of the guide rail. The feed servo motor 10 is fixed on the connection base 11 . The output shaft of the feed servo motor 10 is fixed to one end of the ball screw 21 .
[0045] like figure 1 , 2, 4, 5, 6, 9 and 10, the installation device includes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com