

Water bottom dirt removal robot and application method thereof
A robot and cleaning technology, which is applied in earth moving machines/shovels, mechanically driven excavators/dredging machines, construction, etc., can solve problems affecting the normal growth of aquatic products, affecting breeding hygiene, etc., to improve the breeding environment and Growth efficiency and the effect of ensuring water quality in aquaculture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
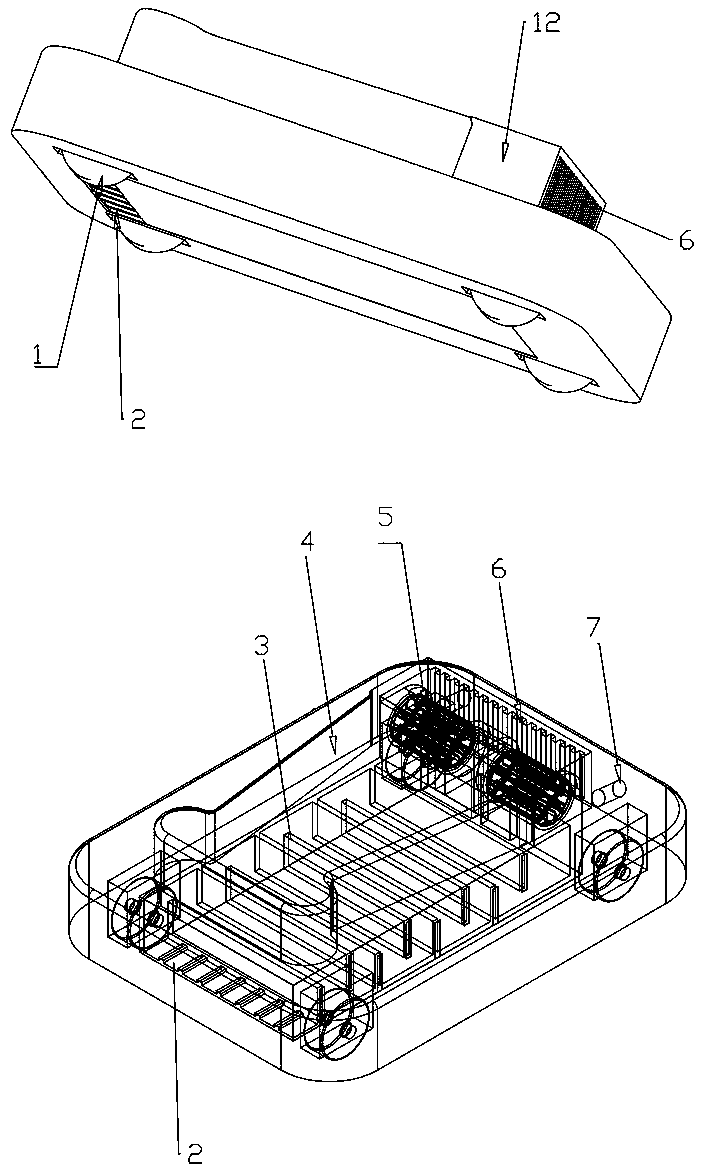
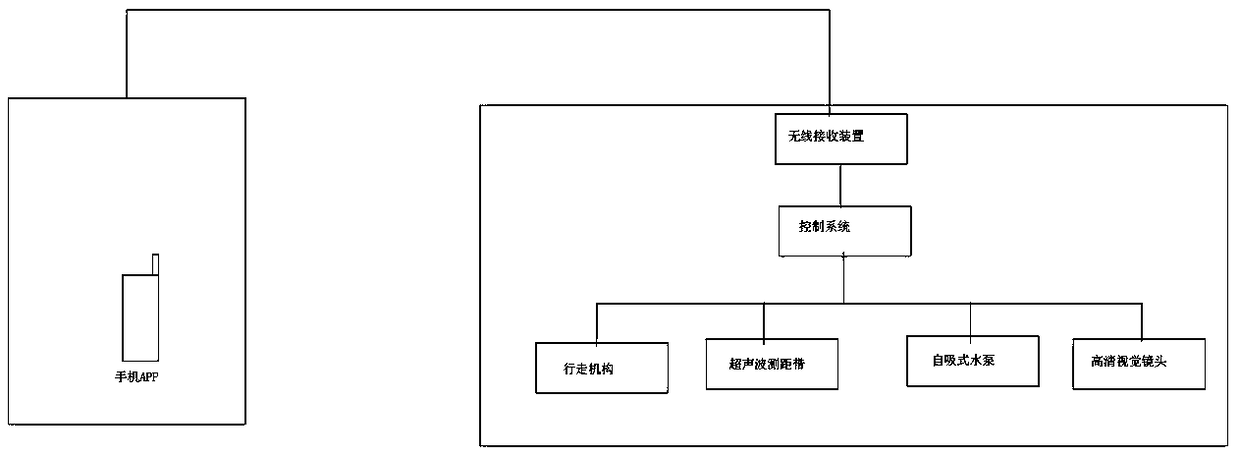
[0020] The underwater cleaning robot described in Embodiment 1 of the present invention, such as figure 1 , 2 As shown, it includes: a traveling mechanism 1 arranged at the bottom of the robot for carrying and transporting, the traveling mechanism is connected to a control system arranged inside the robot, the control system is connected with a wireless receiving device, the inside of the robot is a filter cavity, and the upstream of the filter cavity is connected to a The sewage suction port 2 at the front bottom of the robot, a filter plate 3 is arranged in the filter cavity, and a transparent manual cleaning window 4 is arranged on the top of the filter cavity corresponding to the upper position of the filter plate, and a self-priming water pump is connected downstream of the filter plate. 5. The outlet of the self-priming water pump is connected to the negative pressure water outlet 6 located at the upper rear of the robot, and a video surveillance camera 7 connected to th...
Embodiment 2
[0023] The method of using the underwater cleaning robot described in Embodiment 2 of the present invention includes the following steps:
[0024] Step 1. Charge the robot and put it into the pool, and select the automatic mode; the robot enters the bottom of the pool and detects the environment at the bottom of the pool through the video surveillance camera;
[0025] Step 2. According to the environmental image information transmitted by the video surveillance lens, select the path planning mode through the mobile phone APP software, and control the robot to walk on the bottom of the water according to the actual use needs to complete the route planning. The route traveled by the robot is the automatic cruise during actual work. route;
[0026] Step 3. The robot operates according to the planned underwater cleaning route, walking speed and cleaning intensity according to the needs; including the side wall of the pool can also be cleaned;
[0027] Step 4. Start the robot to e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More