

Mechanical arm convenient to adjust
A manipulator and driving motor technology, applied in the field of manipulators, can solve problems such as poor clamping and easy falling off, and achieve the effects of not easy to fall off, good general performance, and strong adjustable performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments.
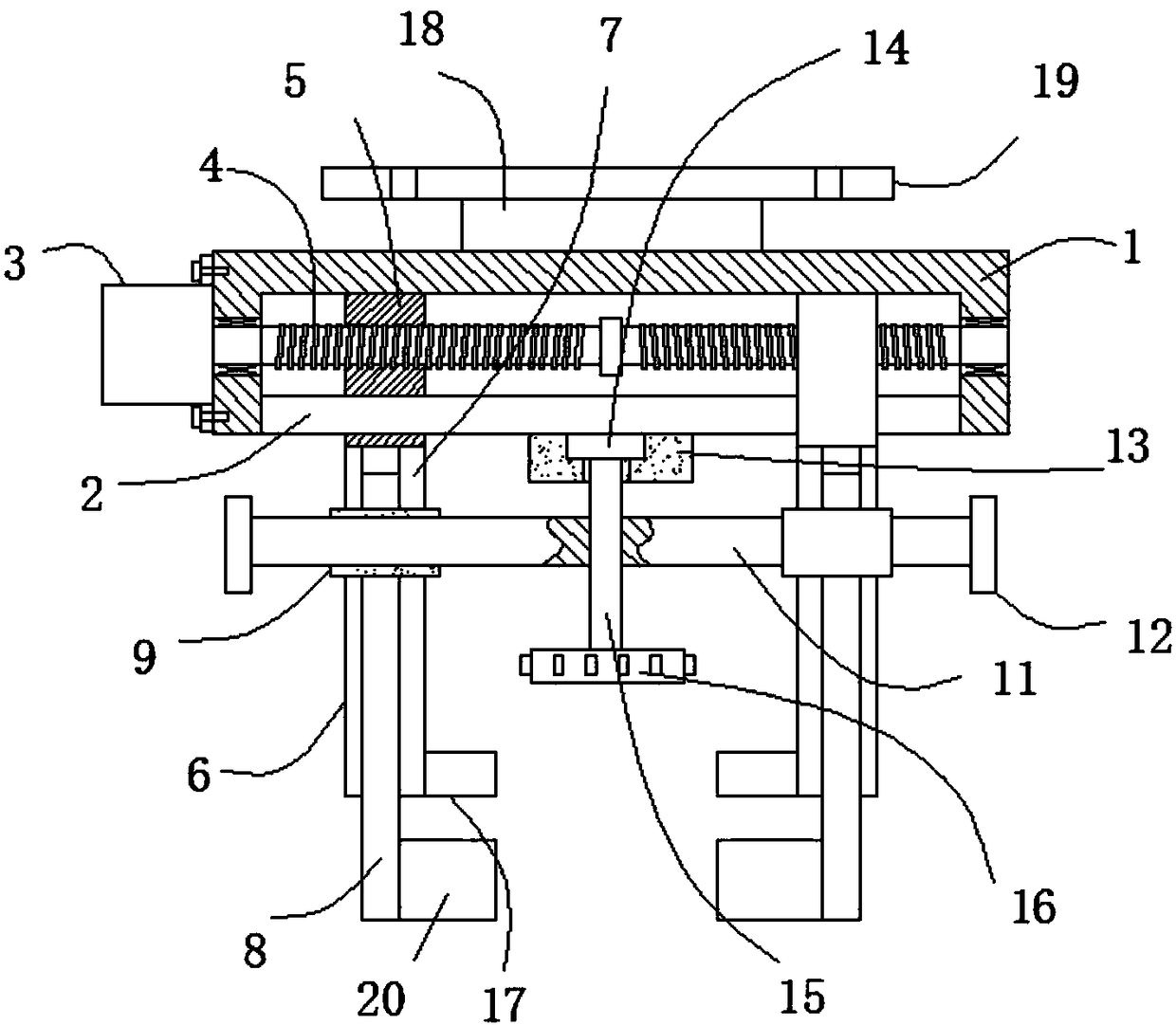
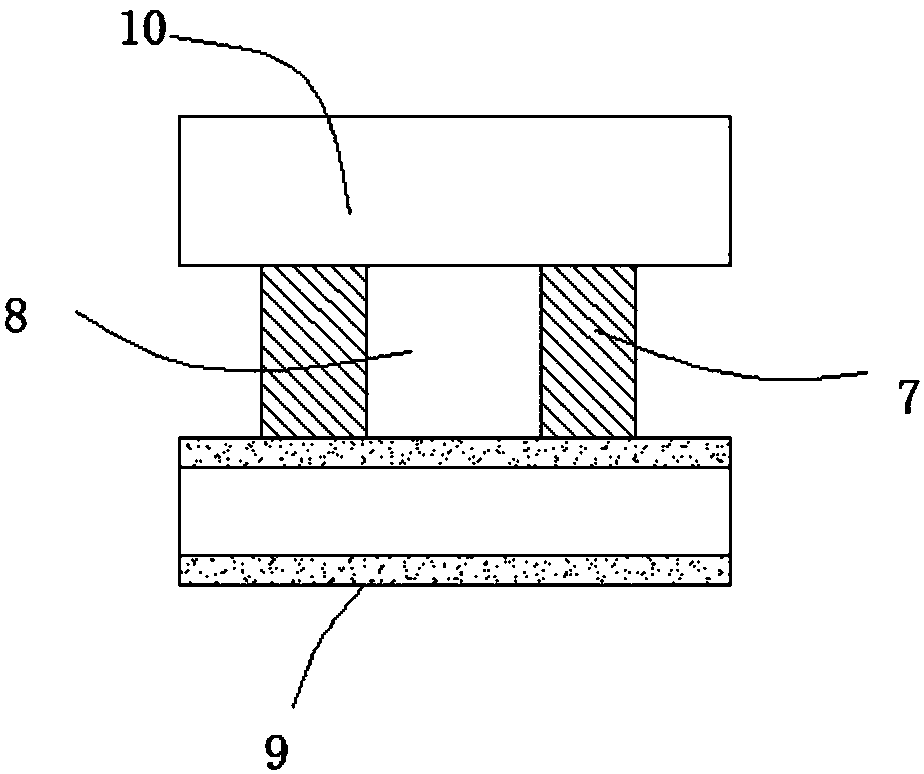
[0019] Reference Figure 1-3 , An easy-to-adjust manipulator, comprising a hollow mounting block 1 with an opening at the bottom, and a rectangular rod 2 is welded vertically on the opposite inner wall of the opening. One side of the hollow mounting block 1 is screwed with a drive motor 3, and the output of the drive motor 3 The shaft is fixed with a first threaded rod 4 rotatably connected to the hollow mounting block 1 through a coupling. The first threaded rod 4 is located on the inner side of the hollow mounting block 1, and the outer side of the first threaded rod 4 is provided with positive and negative threads along the length directi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More