Flexible mechanical hand
A manipulator and flexible technology, applied in the field of flexible manipulators, can solve the problems of low friction, high cost, falling objects, etc., and achieve the effects of improving stability, increasing contact area, and increasing friction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
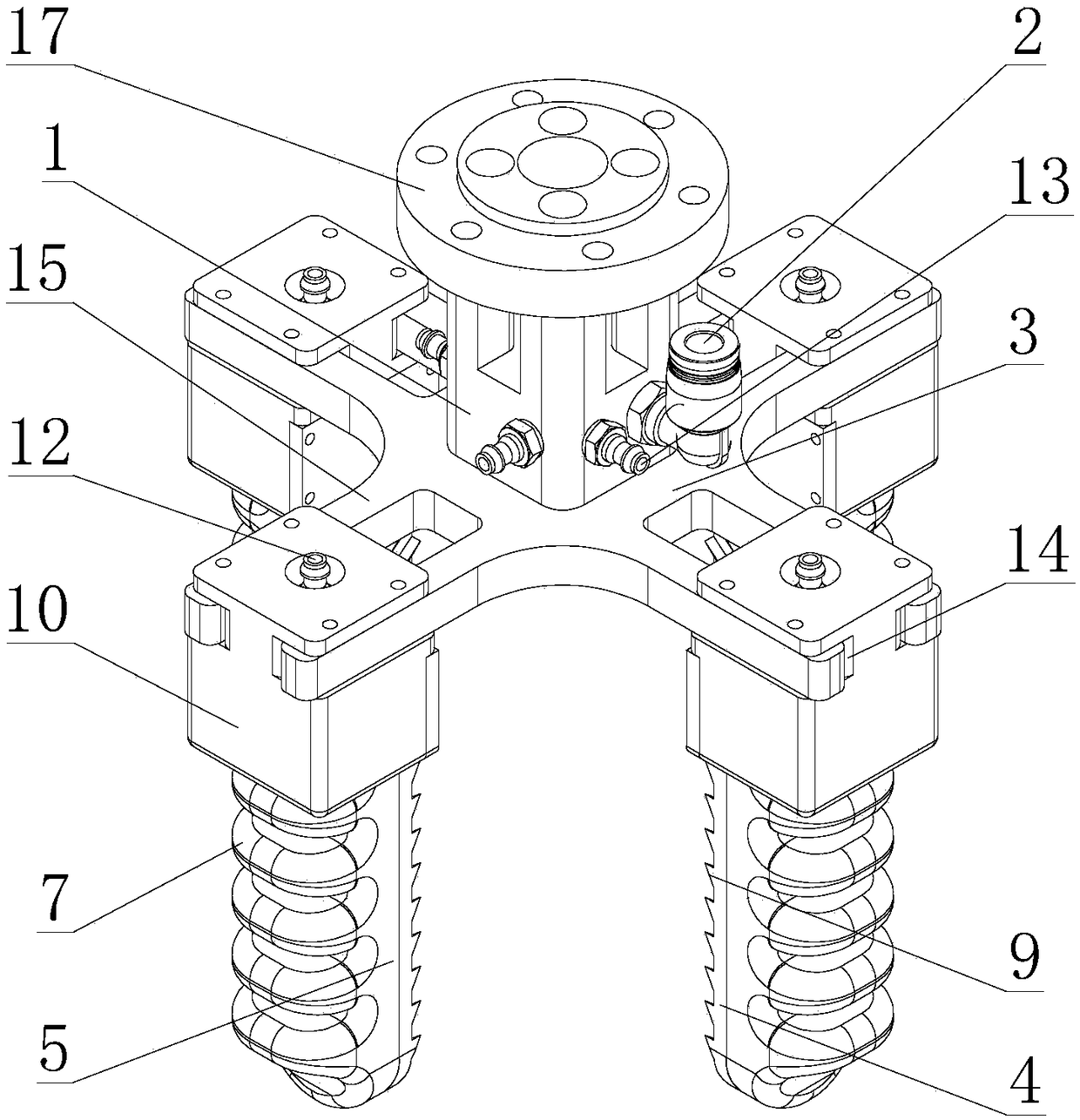
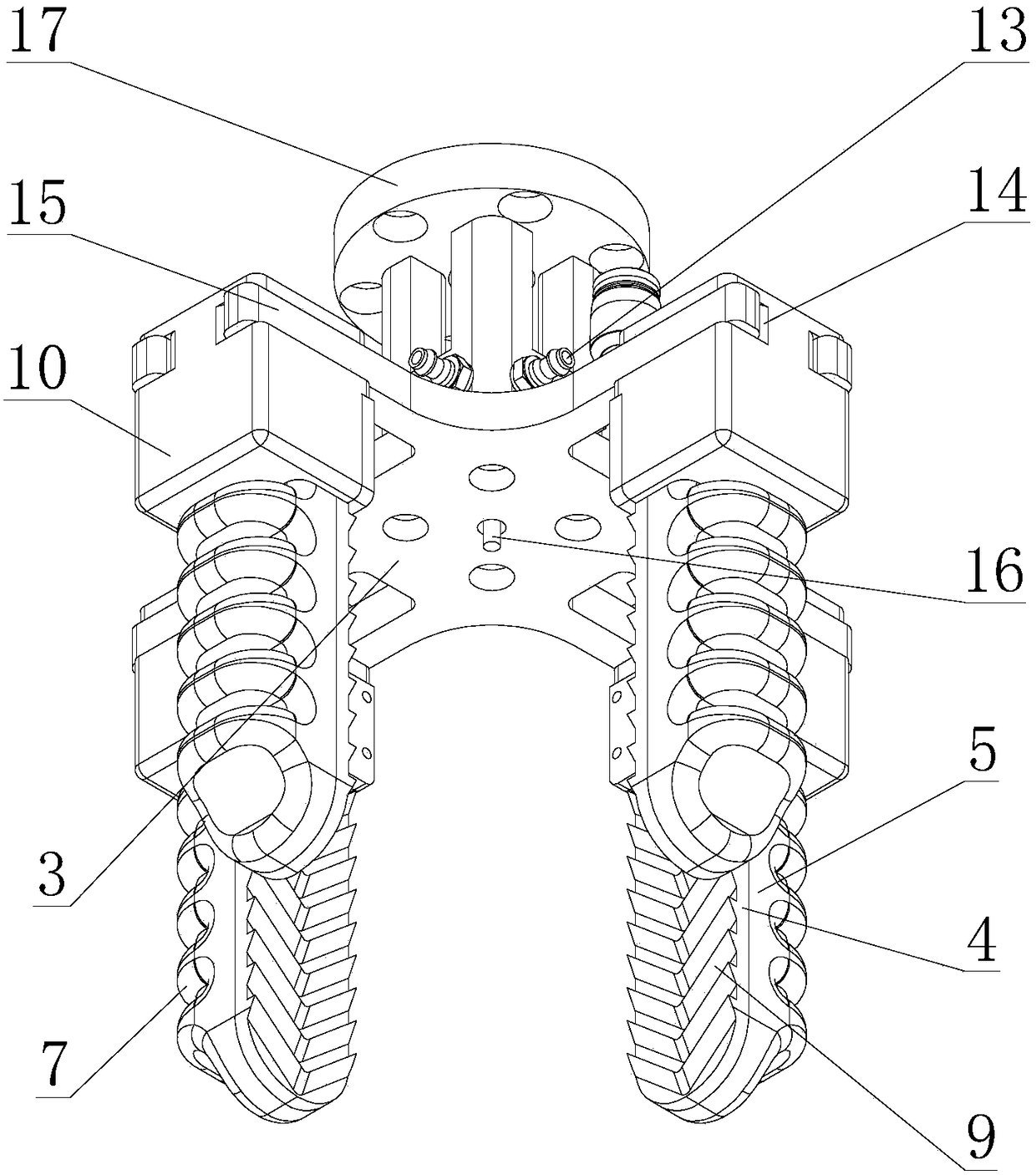
[0024] see Figure 1-3 As shown, the above-mentioned flexible manipulator includes a connecting column 1 with a hollow cavity, a total air inlet 122 arranged on the connecting column 1 communicated with the hollow cavity, a connecting plate 3 located at one end of the connecting column 1, at least Two sets of finger mechanisms. In this embodiment, there are four groups of finger mechanisms, and the rings of the four groups of finger mechanisms are evenly spaced outside the connecting column 1 , and the surrounding centers of the four groups of finger mechanisms are located on the axis of the connecting column 1 . The included angle between any two of the four groups of finger mechanisms is 90°.
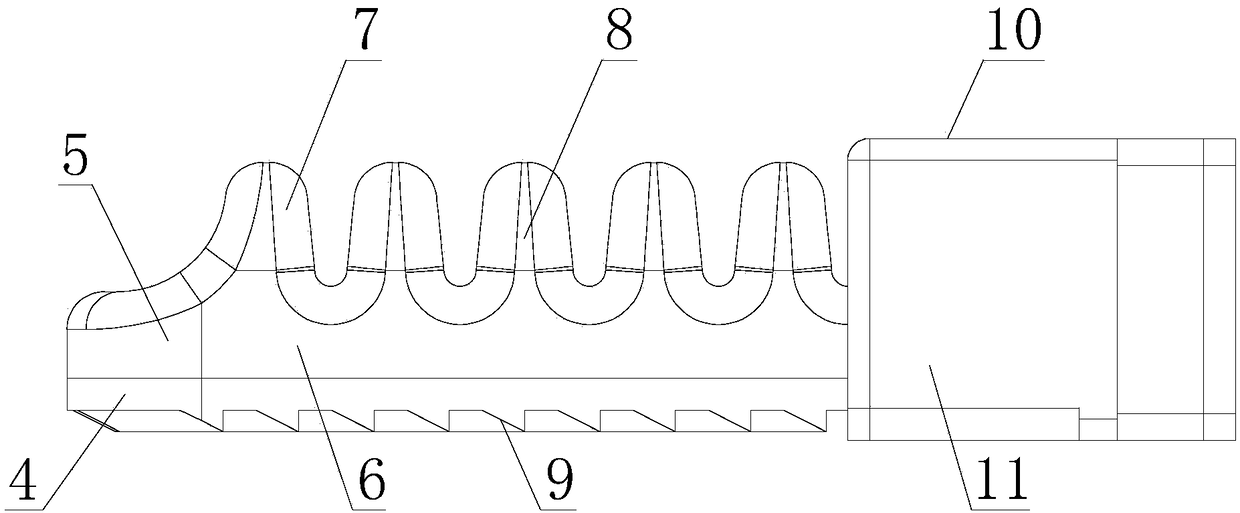
[0025] The finger mechanism includes a finger surface 4, a finger back 5 connected to one side of the finger surface 4, the finger surface 4 is dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com