

A Method of Acceleration and Deceleration Control in Trajectory Planning of Numerical Control System
A technology of acceleration and deceleration control and numerical control system, which is applied in the field of servo system motion control, can solve the problems of numerical control system acceleration, jerk curve not smooth enough, deceleration, etc., to reduce shock and vibration, smooth jerk curve, and simple control algorithm model Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the above-mentioned objects, features and advantages of the present invention more obvious and understandable, the specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
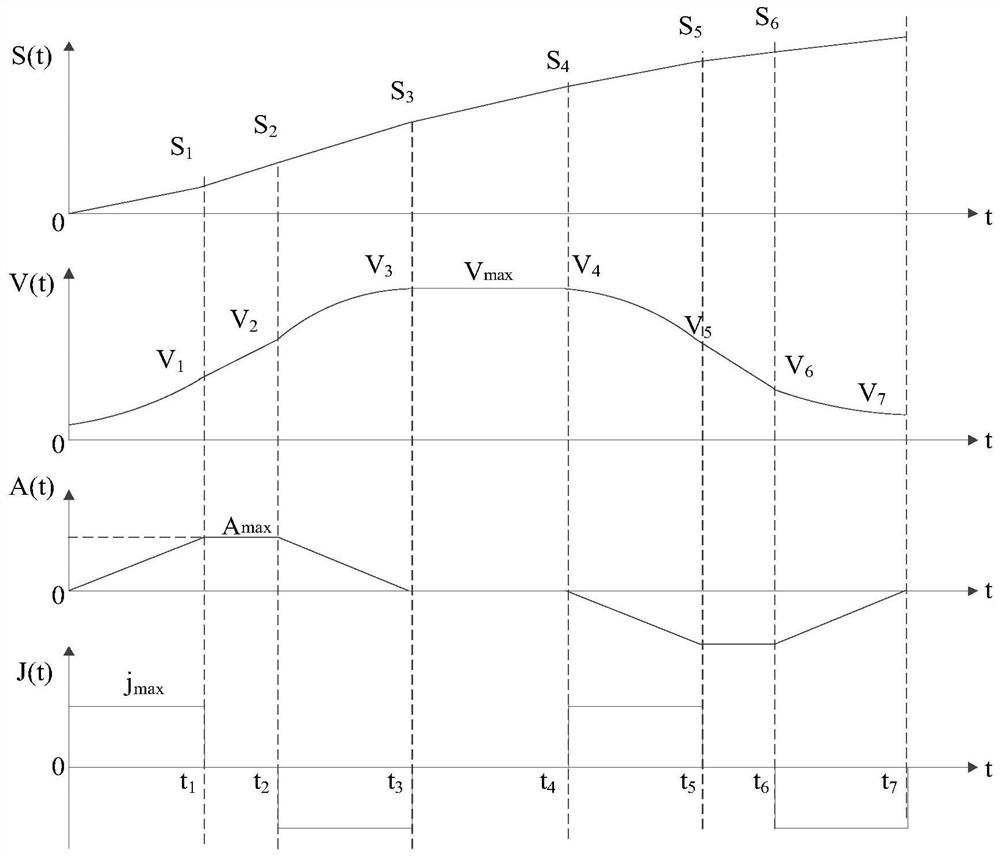
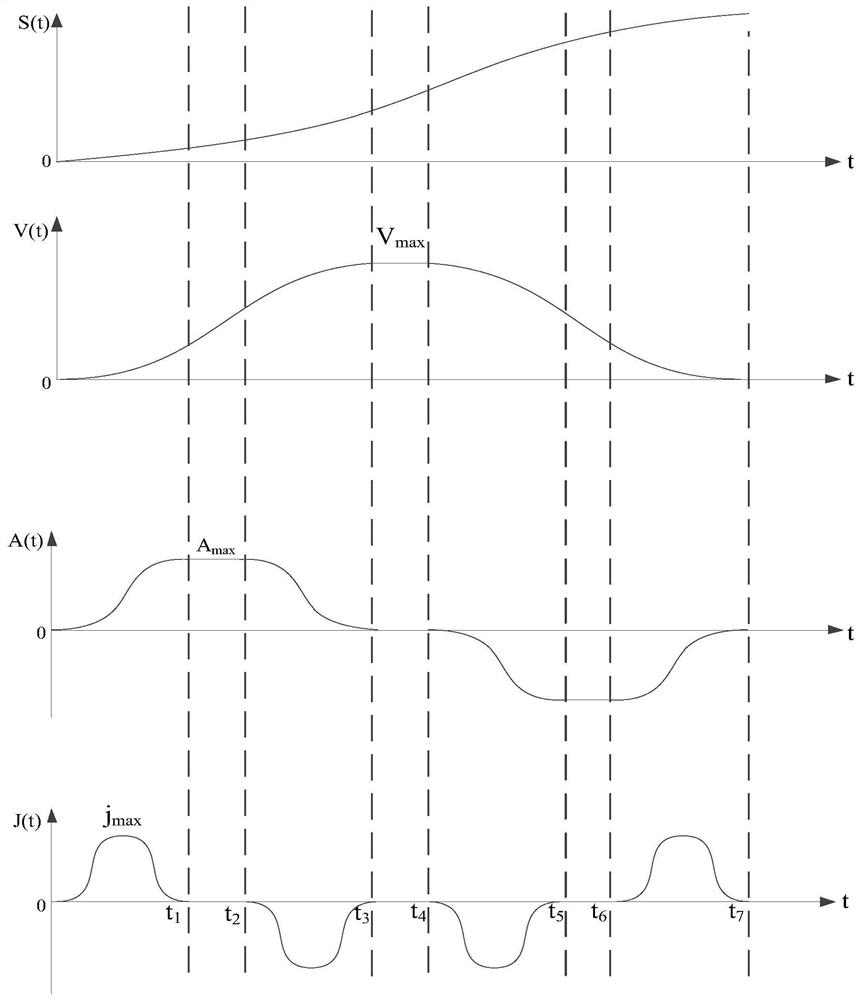
[0025] The purpose of the present invention is to provide an improved sine function square curve acceleration and deceleration control method applied to trajectory planning of a high-precision servo system. image 3 Shown is the model of the modified sine function square curve acceleration and deceleration curve, where j max Is the maximum value of jerk during operation, a max Is the maximum acceleration, V max Maximum speed allowed for processing. The whole acceleration and deceleration curve can be divided into 7 symmetrical stages, 0~t 1 Are all acceleration phases, t 1 ~t 2 Is the uniform acceleration stage, t 2 ~t 3 To reduce the acceleration phase, t 3 ~t 4 Is the uniform speed stage, t 4 ~t 5 Is the acceleratio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More