

Multi-view image pick-up system, terminal device, and robot
A camera system and imaging technology, applied in the field of visual navigation, to achieve the effects of expanding the scope of use, improving integration, and reducing hardware costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] In order to make the purpose, technical solution and advantages of the present application clearer, some embodiments of the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
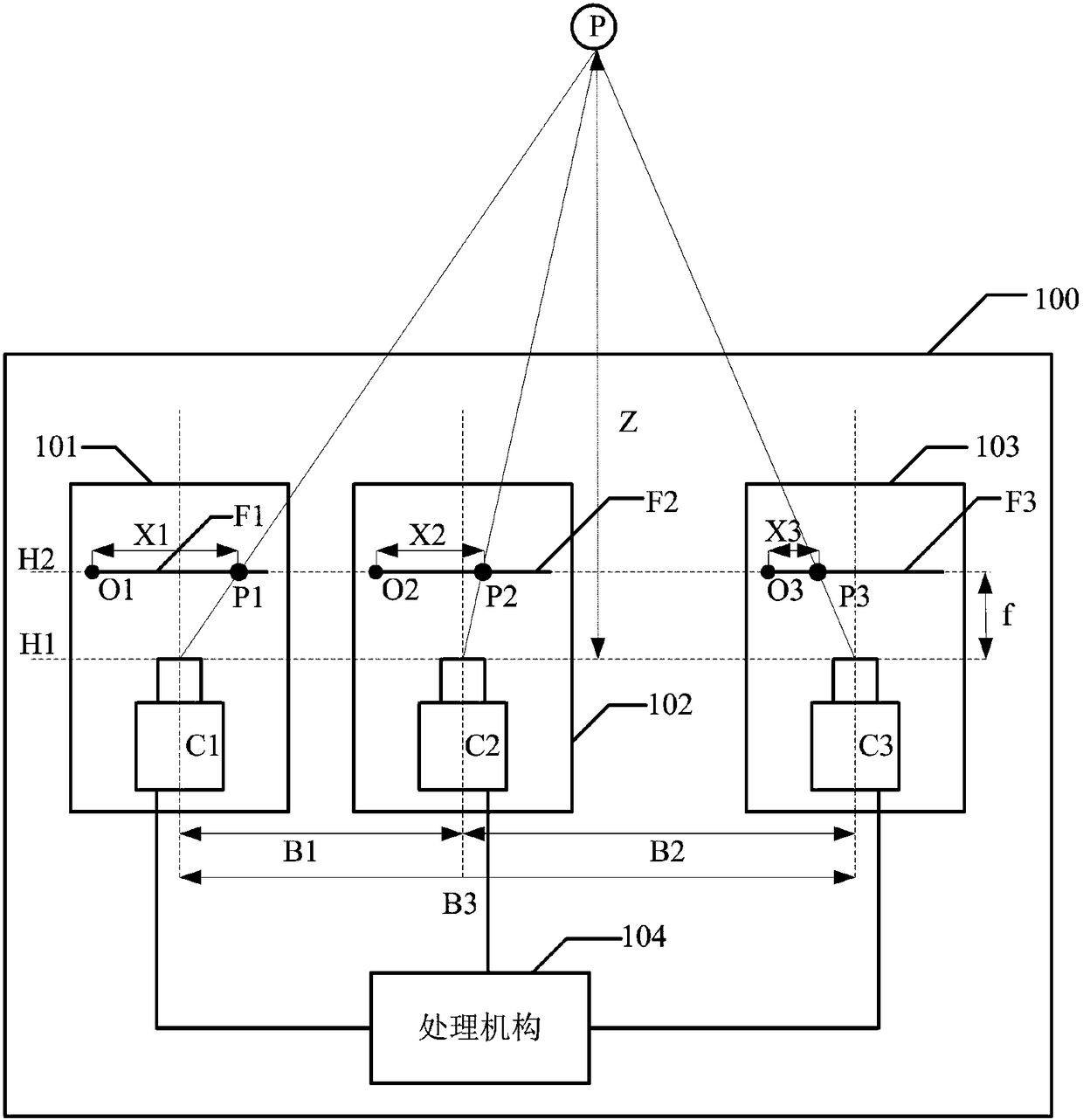
[0013] The first embodiment of the present application relates to a multi-eye camera system, which includes a processing mechanism and at least three visual sensing mechanisms. Wherein, the focal lengths of at least three visual sensing mechanisms are the same, and the optical centers of at least three visual sensing mechanisms are located on the same horizontal line (for the convenience of description, the horizontal line where the optical centers of the visual sensing mechanisms are hereinafter referred to as the first horizontal line), and do not ove...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More