

Sliding mode fault tolerant control method for partial failure of multi-agent system actuator
A multi-agent system, fault-tolerant control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as non-consideration of system nonlinearity and simple fault model
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further explained below in conjunction with the accompanying drawings.
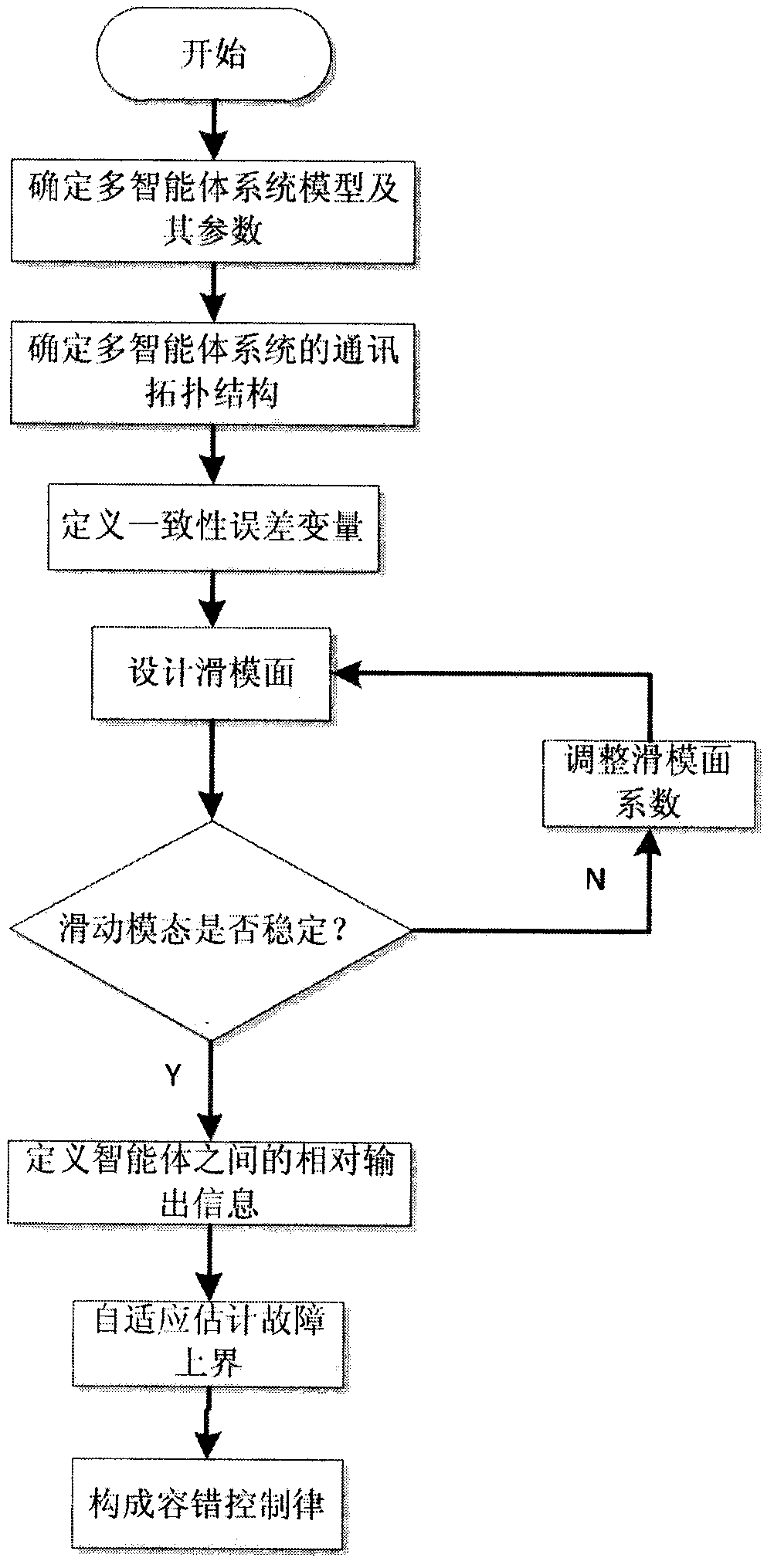
[0051] Such as figure 1 As shown, a sliding mode fault-tolerant control method for the partial failure of the actuator in the multi-agent system, when there is a partial failure of the actuator in the multi-agent system, combined with self-adaptive technology, a sliding mode fault-tolerant control method is proposed, including The specific steps are as follows:
[0052] Step 1) Determine the model and parameters of the pilot-following multi-agent system, including the following steps:
[0053] Step 1.1) Determine the motion model of the leader, as shown in formula (1):
[0054]
[0055] in, and Respectively represent the position and speed state of the leader at time t; Control input for navigator; is a continuous vector-valued function representing the inherently nonlinear dynamic behavior of the navigator;
[0056] Step 1.2) Determine the motion model o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More