Inspection method, installation, device and storage medium for vehicle automatic driving algorithm
A technology of automatic driving and inspection method, applied in the direction of instruments, electrical testing/monitoring, control/regulation systems, etc., can solve the problems of high inspection cost and time-consuming, and achieve the effect of reducing inspection cost and inspection time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
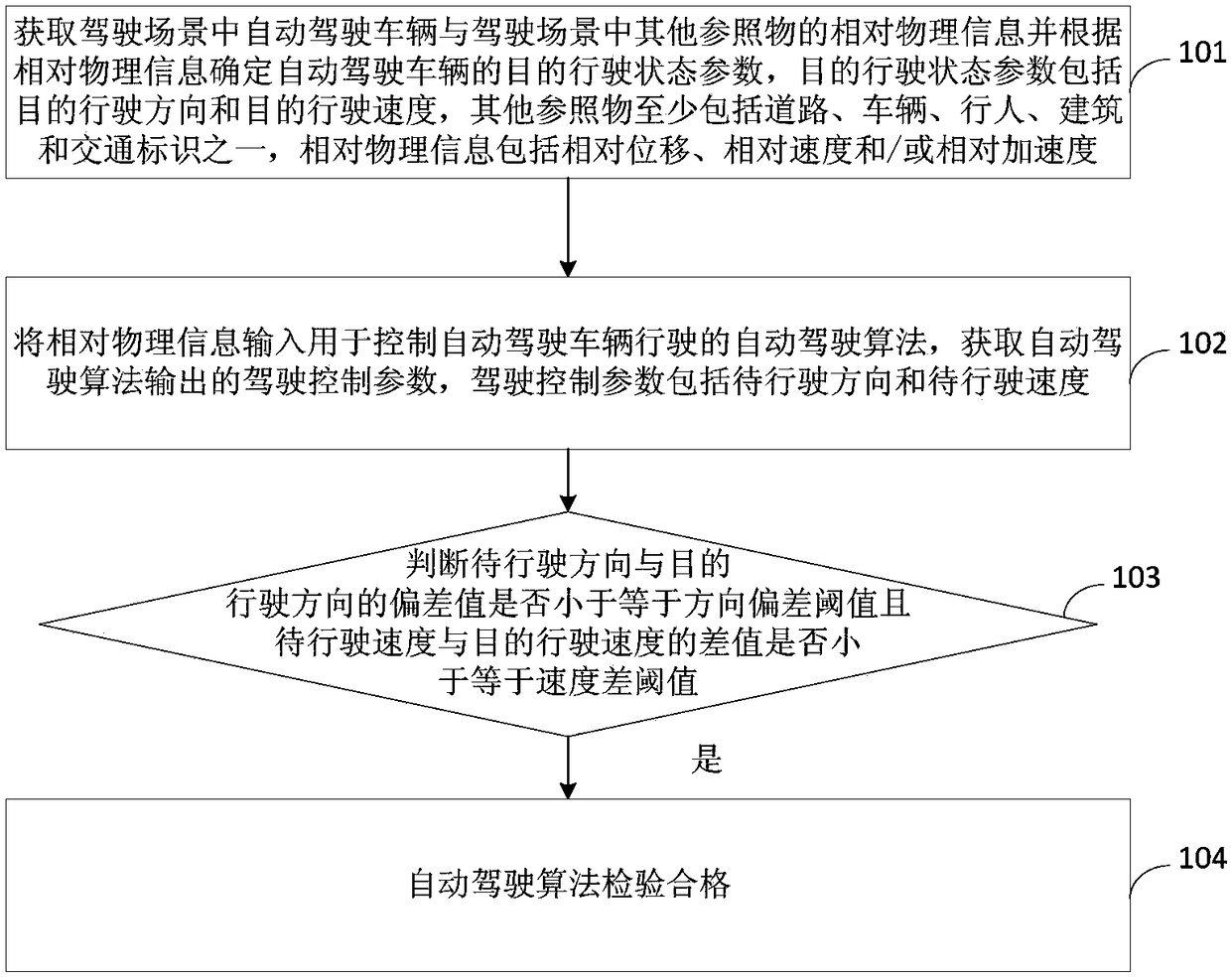
[0026] figure 1 This is a flowchart of a method for verifying an automatic driving algorithm for a vehicle provided in the first embodiment of the present invention. This embodiment can be applied to a verification scenario of an automatic driving algorithm for controlling the driving of an automatic driving vehicle. The method can be performed by a vehicle automatic driving algorithm verification device. To execute, the device can be built into the self-driving car, or placed in the cloud or server, specifically including the following steps:
[0027] Step 101: Obtain relative physical information of the autonomous vehicle in the driving scene and other reference objects in the driving scene, and determine the target driving state parameters of the autonomous vehicle according to the relative physical information. The target driving state parameters include the target driving direction and the target driving speed, and others The reference object includes at least one of roads, v...
Embodiment 2
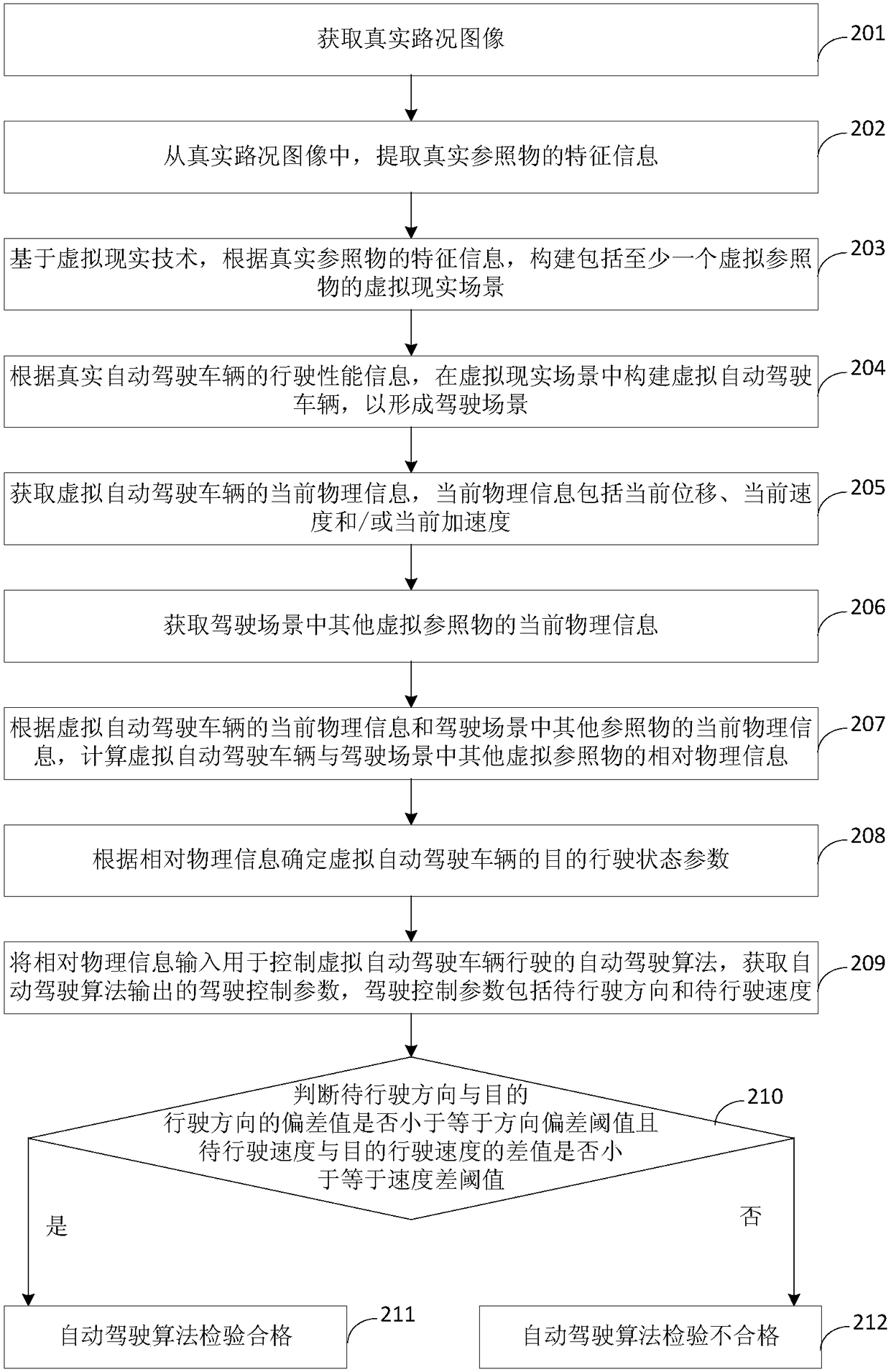
[0043] figure 2 This is a flowchart of a method for verifying a vehicle automatic driving algorithm provided in the second embodiment of the present invention. This embodiment defines the steps of constructing a driving scene and obtaining relative physical information, which specifically include the following steps:
[0044] Step 201: Obtain real road condition images.
[0045] Optionally, it can cooperate with the traffic authority to obtain real road condition images taken by the surveillance camera from the traffic authority, where the real road condition image can be at least one image, or it can be a frame by frame image decomposed from video .
[0046] Step 202: Extract feature information of the real reference object from the real road condition image.
[0047] The real road condition image includes an image of a real reference object, and the real reference object includes at least one of roads, vehicles, pedestrians, buildings, and traffic signs. The characteristic informa...
Embodiment 3
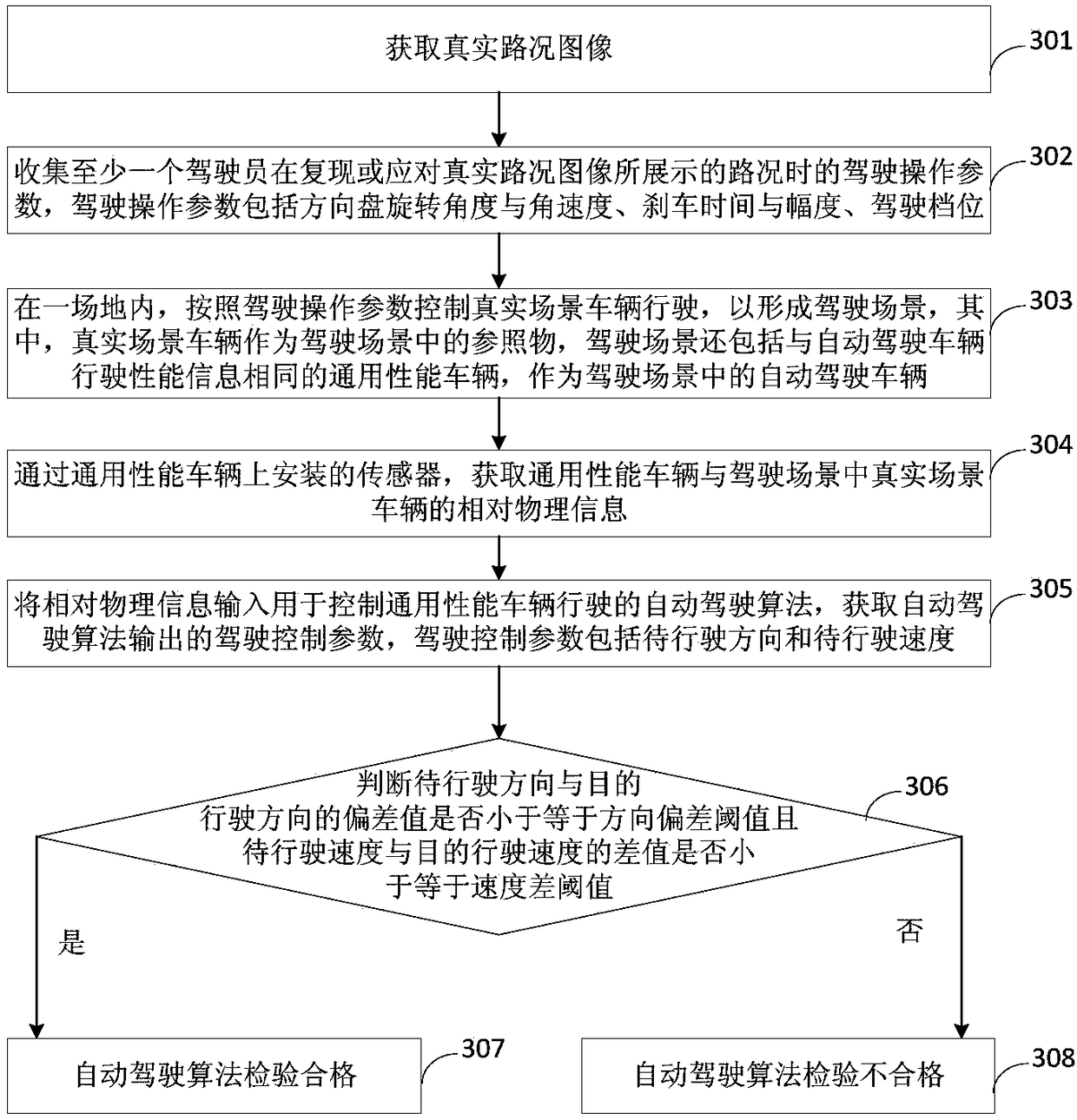
[0069] image 3 This is a flowchart of a method for verifying a vehicle automatic driving algorithm provided in the third embodiment of the present invention. This embodiment limits the steps of constructing a driving scene and obtaining relative physical information, which specifically include the following steps:
[0070] Step 301: Obtain real road condition images. This step is the same as step 201, and will not be repeated here.
[0071] Step 302: Collect driving operation parameters of at least one driver when reproducing or responding to the road conditions shown in the real road condition images. The driving operation parameters include steering wheel rotation angle and angular speed, braking time and amplitude, and driving gear.
[0072] Step 303: In a field, control the real-scene vehicle to drive according to the driving operation parameters to form a driving scene, where the real-scene vehicle is used as a reference in the driving scene, and the driving scene also includes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com