

Control system and control method of picking manipulator
A control system and manipulator technology, applied in the direction of picking machines, manipulators, program-controlled manipulators, etc., can solve problems such as inconvenient debugging of manipulator grasping posture, unstable start and stop characteristics of motors, and affecting the economic value of fruits and vegetables, so as to improve the quality of picking and efficiency, shortened debugging time, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Below in conjunction with accompanying drawing, the present invention will be further described:
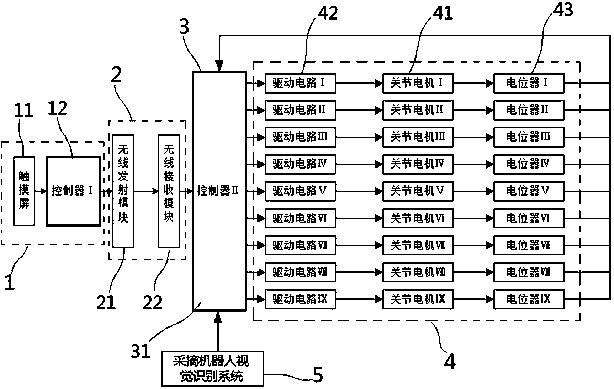
[0041] Figure 1 to Figure 4 An embodiment of the picking manipulator control system of the present invention is shown. figure 1 It is a structural schematic diagram of the picking manipulator control system in this embodiment.
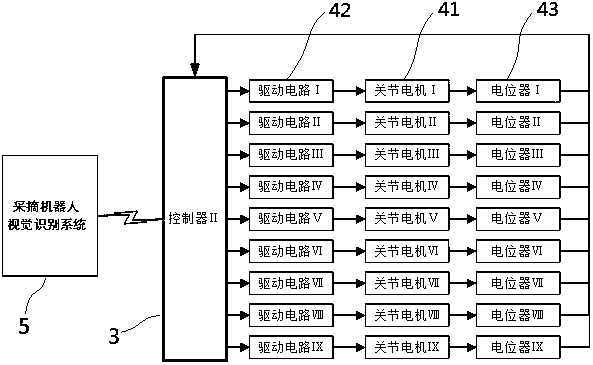
[0042] Such as figure 1 As shown, the picking manipulator control system in this embodiment includes a host computer 1, a lower computer 3, a knuckle motor control module 4 and a visual recognition system 5, and a transmission module 2 is arranged between the upper computer 1 and the lower computer 3; Machine 3 is connected with knuckle motor control module 4 and visual recognition system 5 respectively.
[0043] The upper computer 1, according to the shape and size of different kinds of fruits and vegetables, virtual debugs various optimal grasping postures of the manipulator 7, and transmits them to the lower computer 3 through the transmissi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More