

Parallel clamping manipulator device
A technology of manipulators and splints, applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of inflexibility, large space occupation, and high requirements for component matching accuracy, and achieve the effect of firm arrangement and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
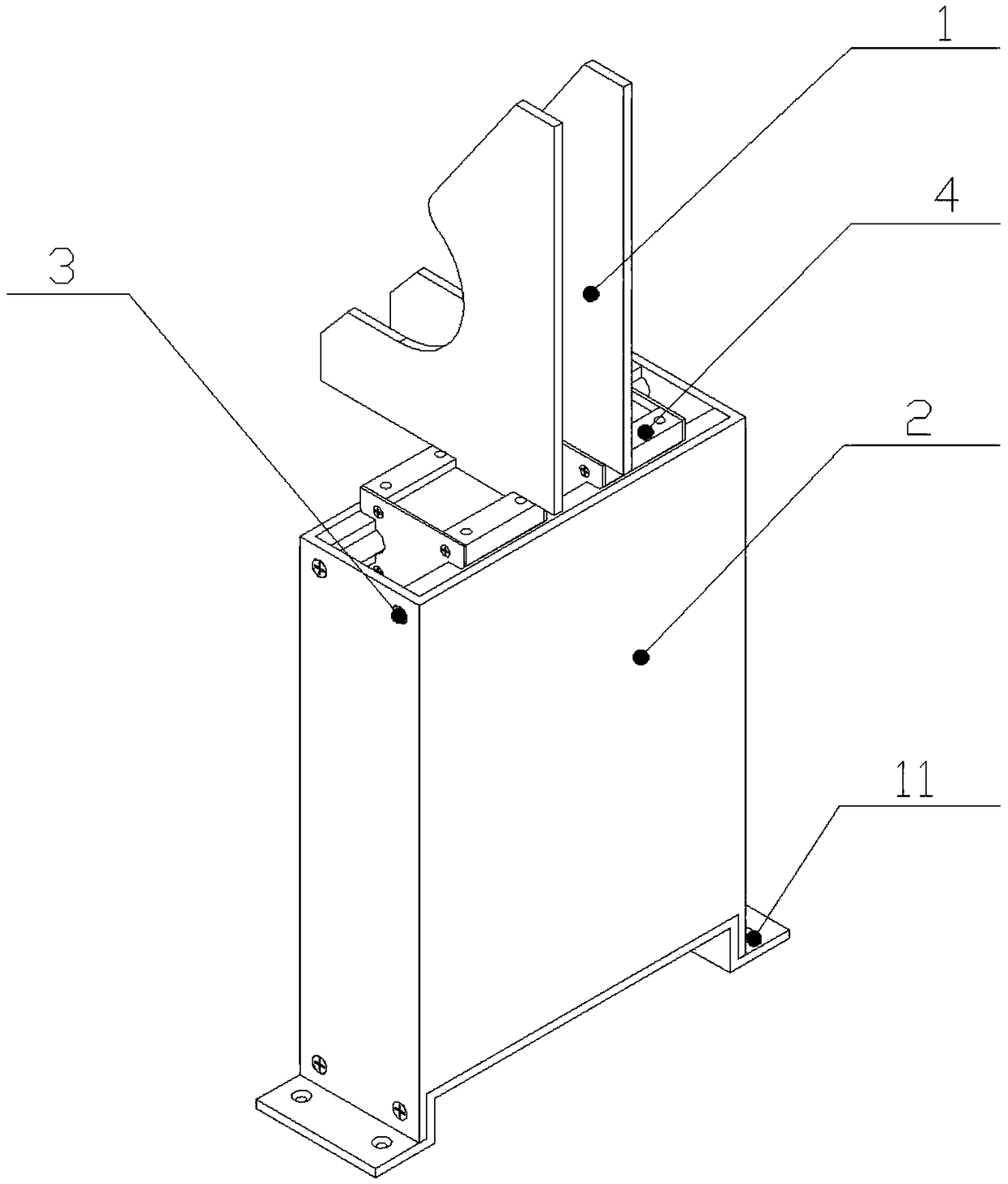
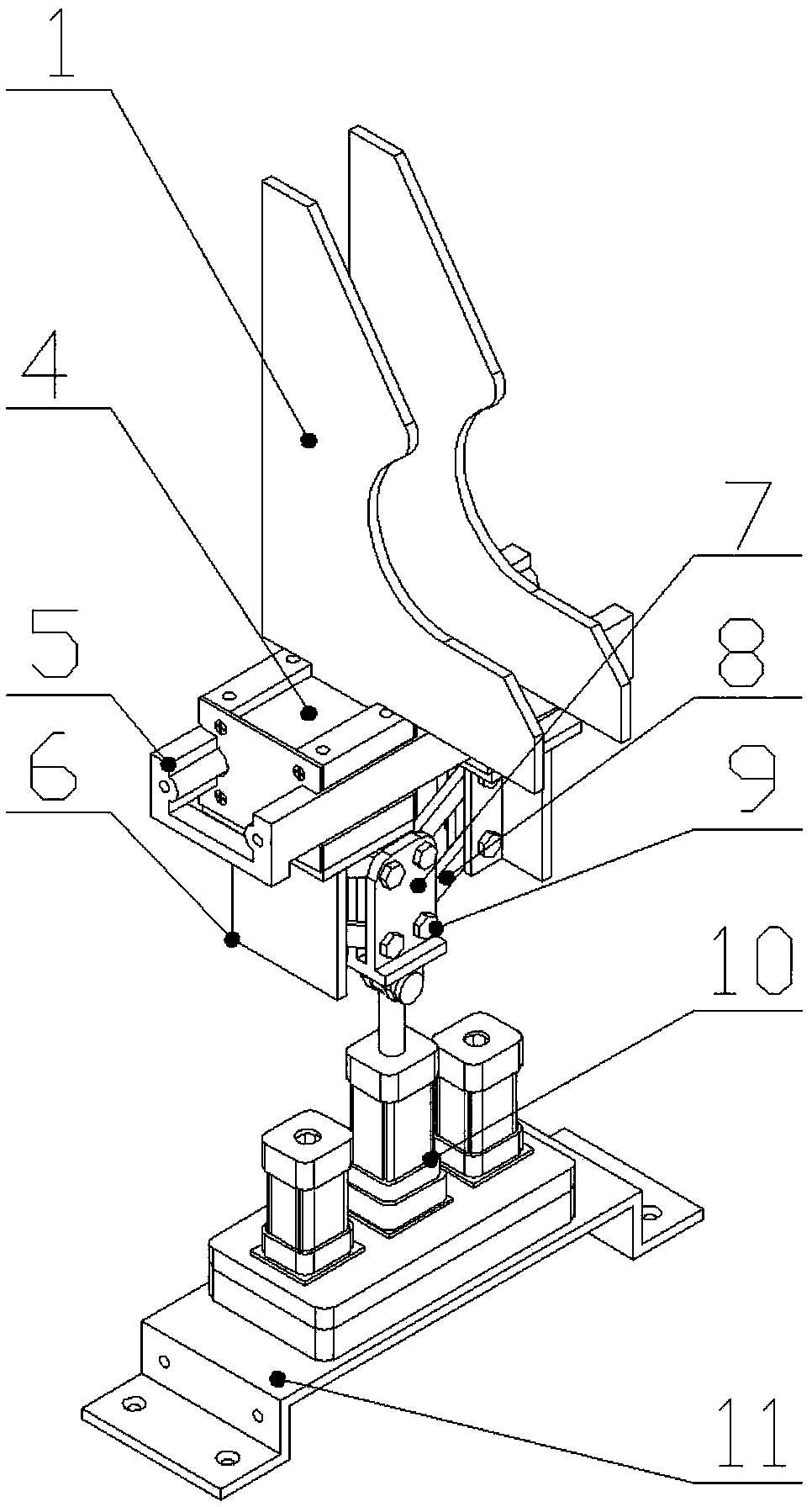
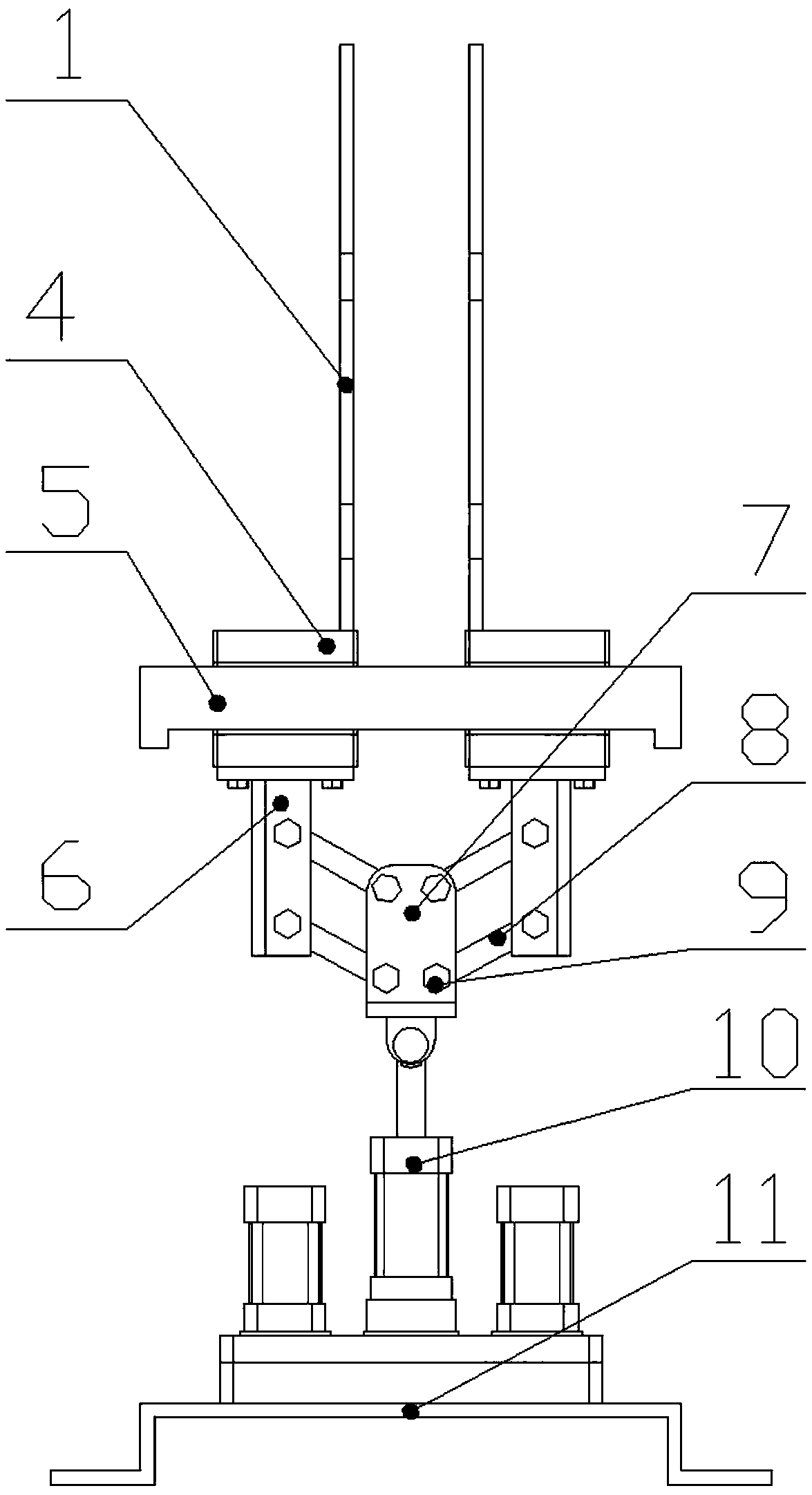
[0026] A robotic device for parallel gripping, such as figure 2 , 3 As shown, it consists of a fixed seat (11), an electric cylinder (10), a hinged four-bar mechanism, a slider (4), a slideway body (5), and a splint (1), wherein the fixed seat (11) is Convex shape design, with fixing screw connection holes on it, and fixed connection with the mechanical arm through the connection screw (3); Figure 9 As shown, the electric cylinder (10) is composed of a servo motor (101), a screw (102), a casing (103), and a cylinder (104), and the casing (103) is connected to the fixing seat ( 11) The convex panel is fixedly connected, the servo motor (101) and the cylinder (104) are fixedly installed on the box body (3), the cylinder (104) is in the middle, and the servo motors are on both sides of the cylinder (104) (101), the screw mandrel (102) is fixedly mounted on the cylinder barrel (104); the hinged four-bar mechanism is a parallelogram mechanism, such as Figure 4 As shown, it is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More