A Path Planning Method for Unmanned Surface Vehicle Based on Adaptive Cuckoo Search Algorithm
A cuckoo search and path planning technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, instruments and other directions, can solve the problems of slow search speed and low accuracy, and achieve enhanced variable diversity, Improve the effect of slow convergence speed and strong global search ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below in conjunction with the accompanying drawings.
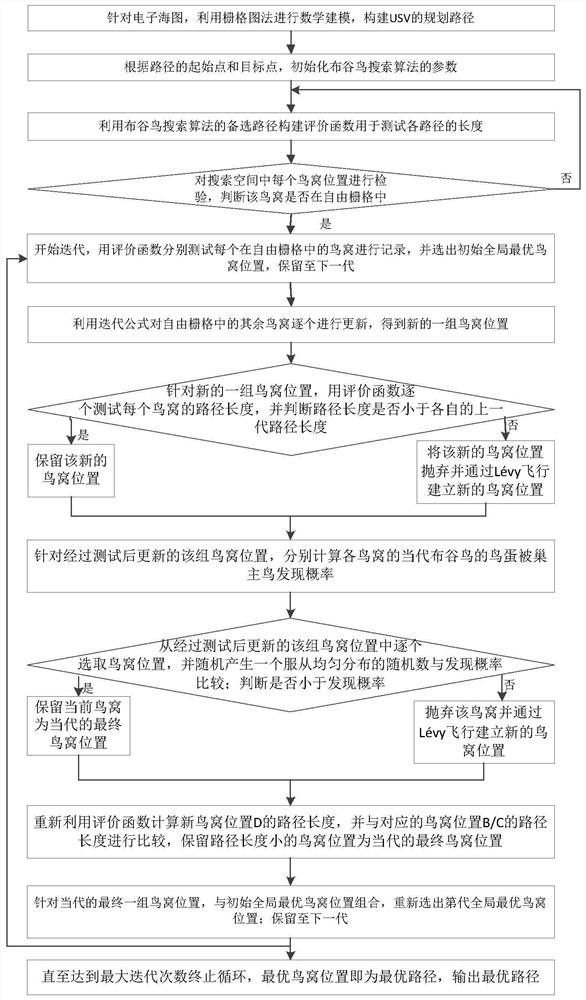
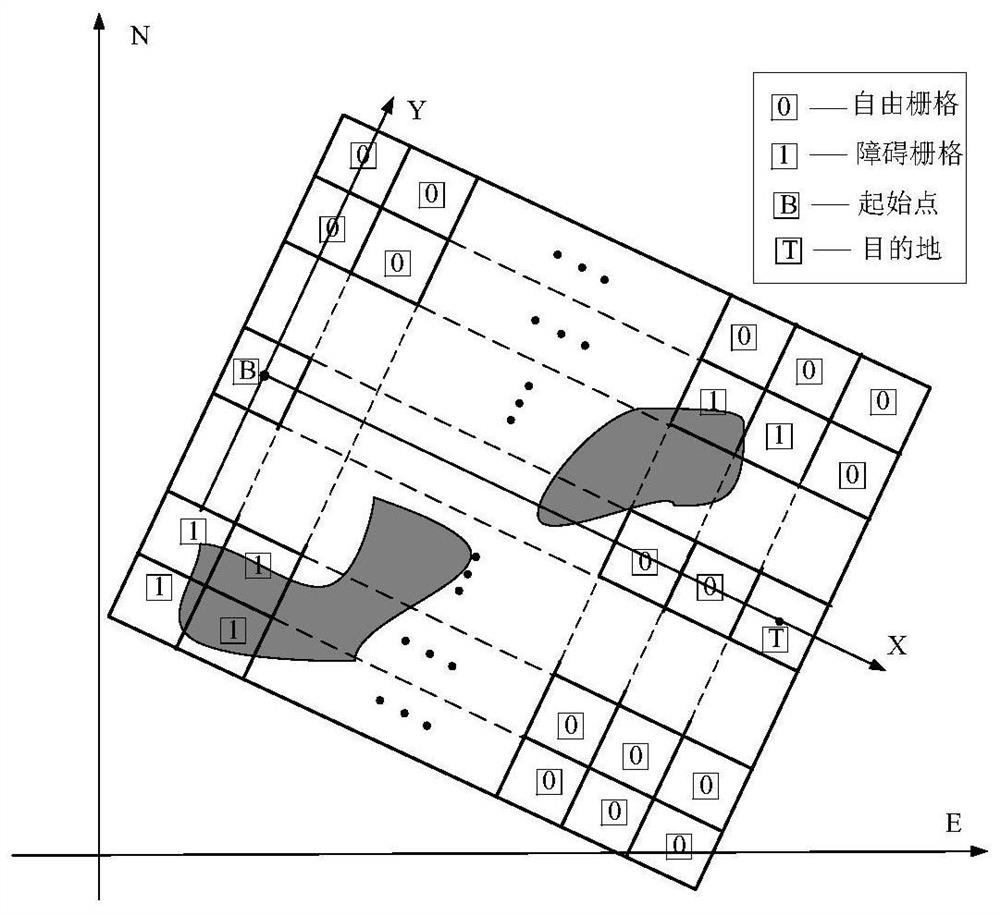
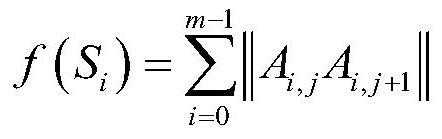
[0048] The present invention relates to the technical field of path planning for surface unmanned boats, in particular to a path planning method for surface unmanned boats based on an adaptive cuckoo search algorithm, such as figure 1 As shown, it includes: mathematical modeling of the path planning problem of surface unmanned vehicles, initialization of the cuckoo search algorithm, optimal path search using the cuckoo search algorithm, selection of the global optimal bird nest position and judgment of the termination condition, and output of the optimal There are five basic steps in the path; the simple and efficient and powerful global search ability of the cuckoo search algorithm is used, and the local search ability and convergence speed of the algorithm are improved. Compared with the traditional surface unmanned vehicle path planning method, it has better intel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com