

Rehabilitation robot multimode control method on basis of multi-information fusion
A rehabilitation robot and multi-information fusion technology, applied in the field of adaptive control strategy, can solve the problems of not considering the adjustment of control system parameters, inaccurate adjustment of control system parameters, and lack of biological information, etc., and achieve accurate and reliable adjustment of control system parameters. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
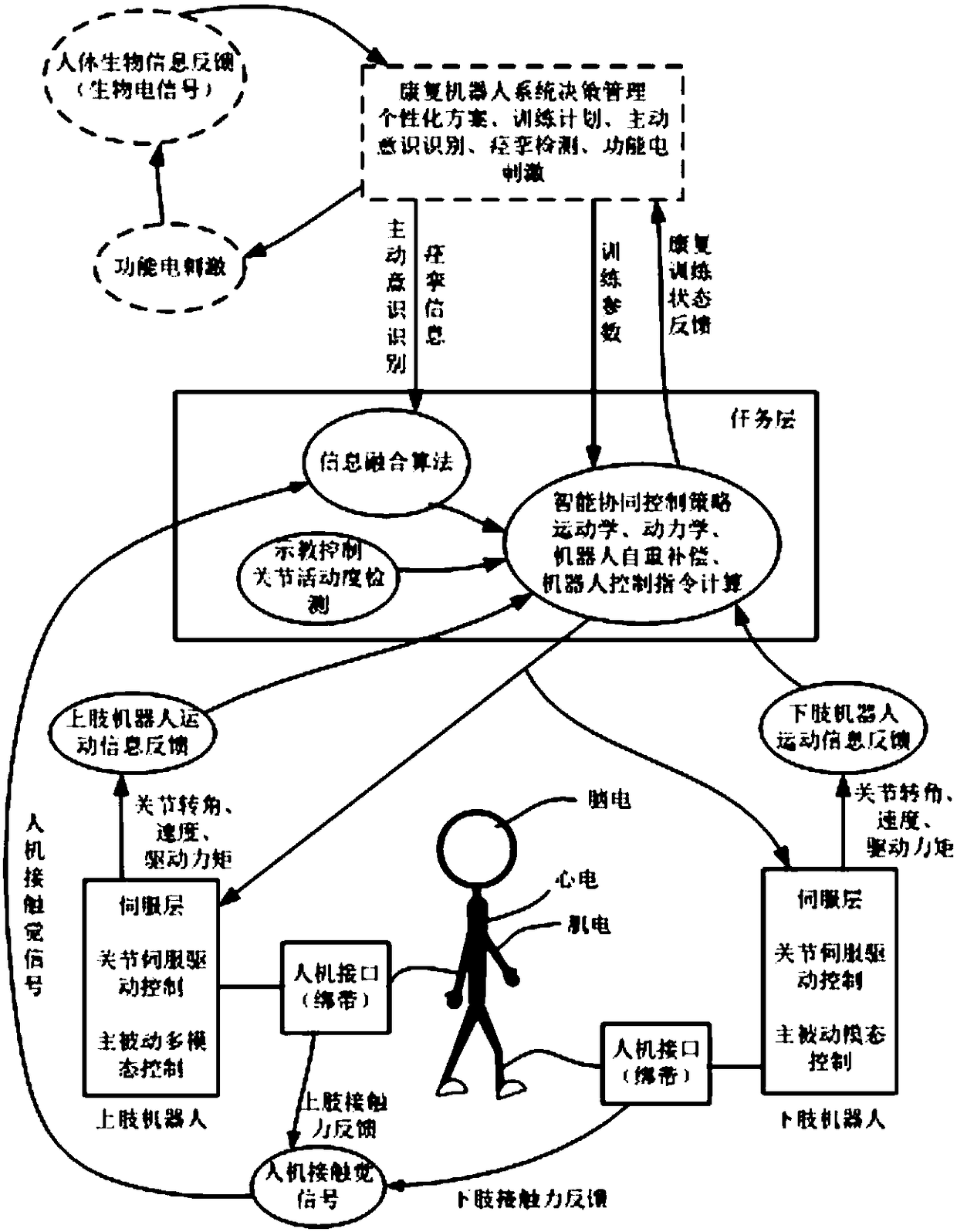
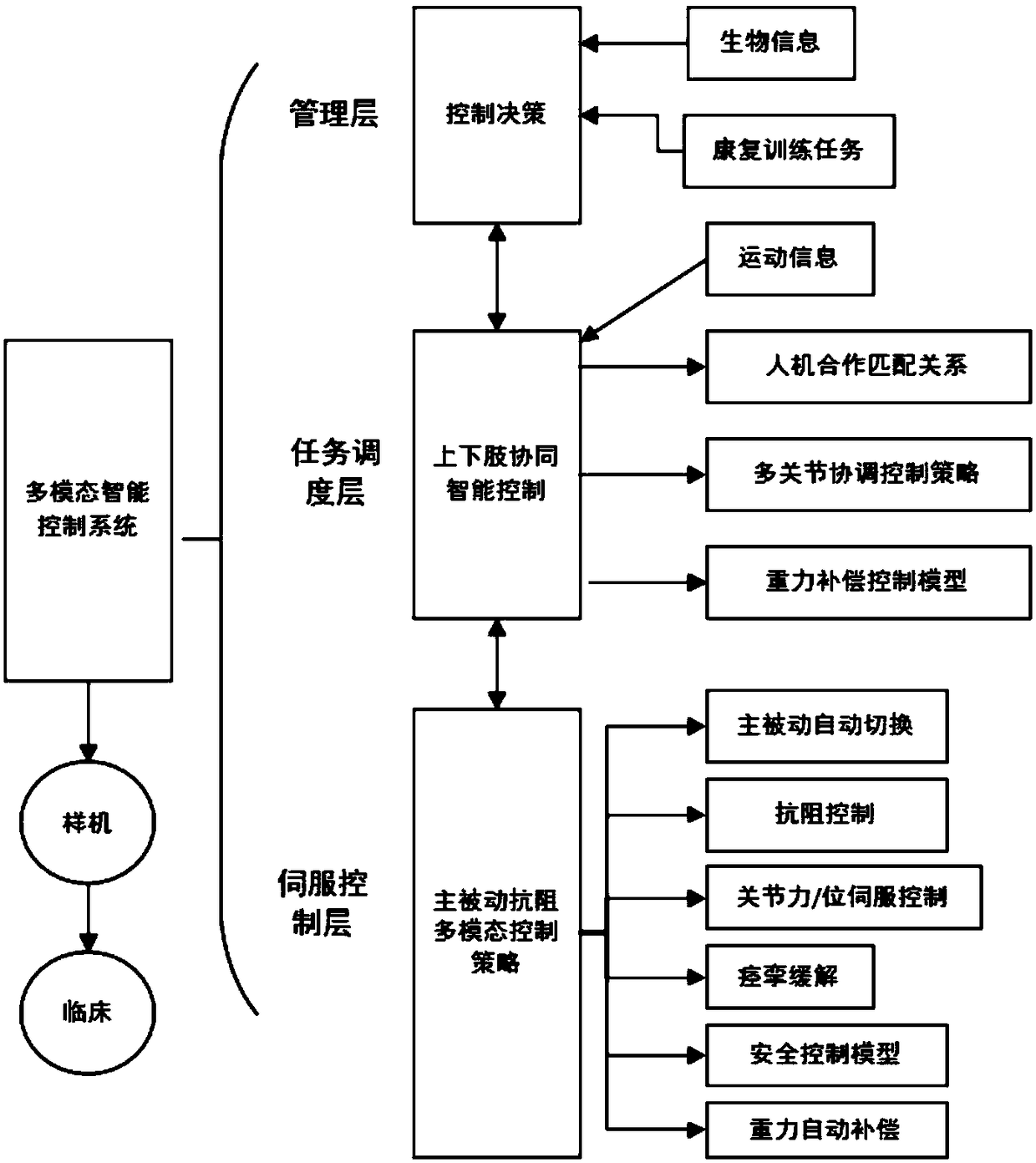
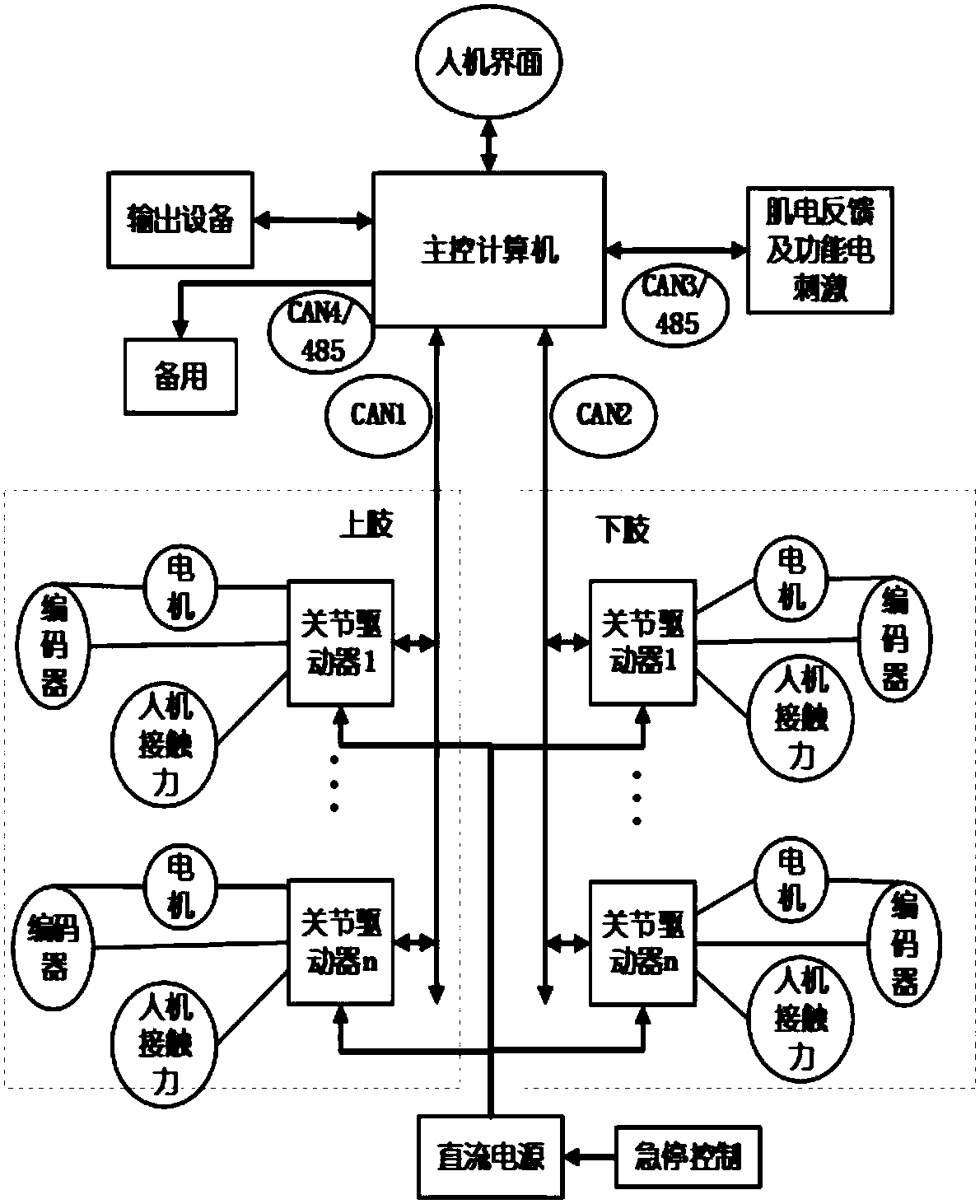
[0024] Combine Figure 1 to Figure 4 The object of the present invention is to provide a control method for a rehabilitation robot, which has multiple training modes such as active mode, passive mode, active and passive mode, and its control system hardware block diagram is as follows image 3 Shown. The rehabilitation robot is a rehabilitation robot for upper and lower limbs. Several joints are driven by a DC servo motor to drive joint movement or generate a certain resistance. An encoder detects the joint position, and the strap obtains the human-machine contact force as the basis for determining the patient's intention. One. The driver and the host computer are connected by two CAN buses. CAN1 is responsible for the communication between the upper limb joint drivers and the computer, and CAN2 is responsible for the communication between the lower...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More