

Rectangular coordinate robot screw driving manipulator and rectangular coordinate robot applying same
A Cartesian coordinate and robot technology, applied in metal processing, metal processing equipment, manufacturing tools, etc., can solve the problems of low precision, inability to realize automatic nail feeding, slow efficiency, etc., and achieve accurate screw-in position, simple and reliable initial positioning, Easy suction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
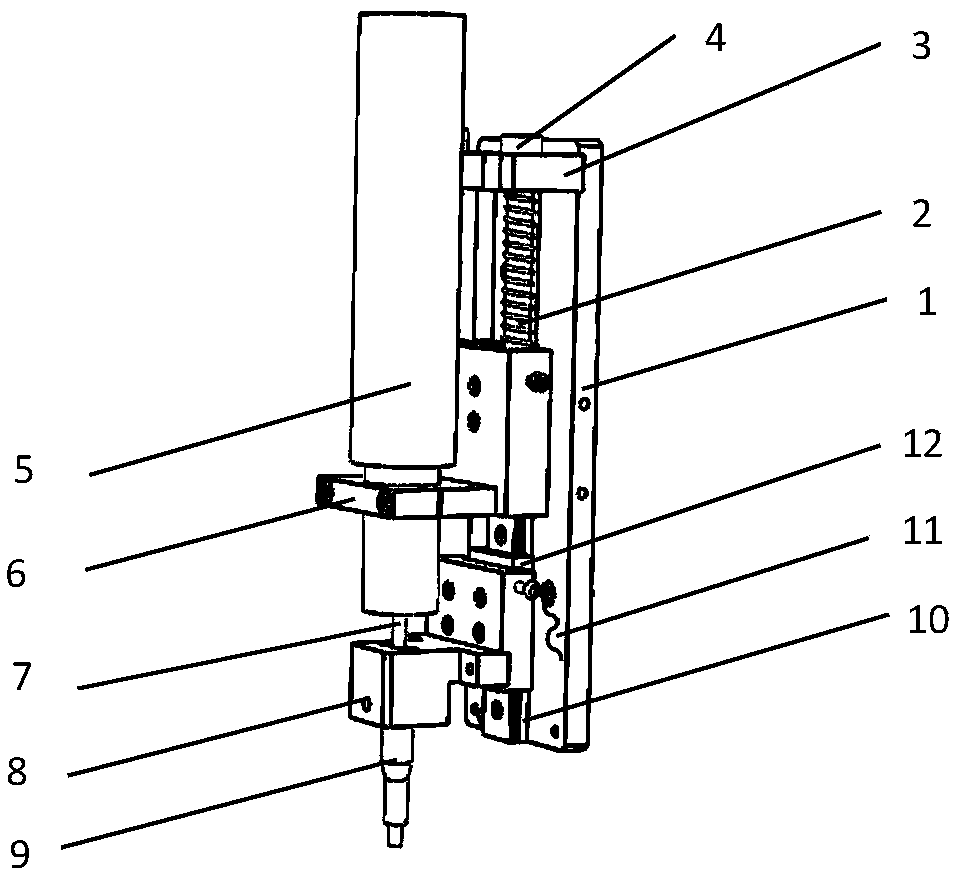
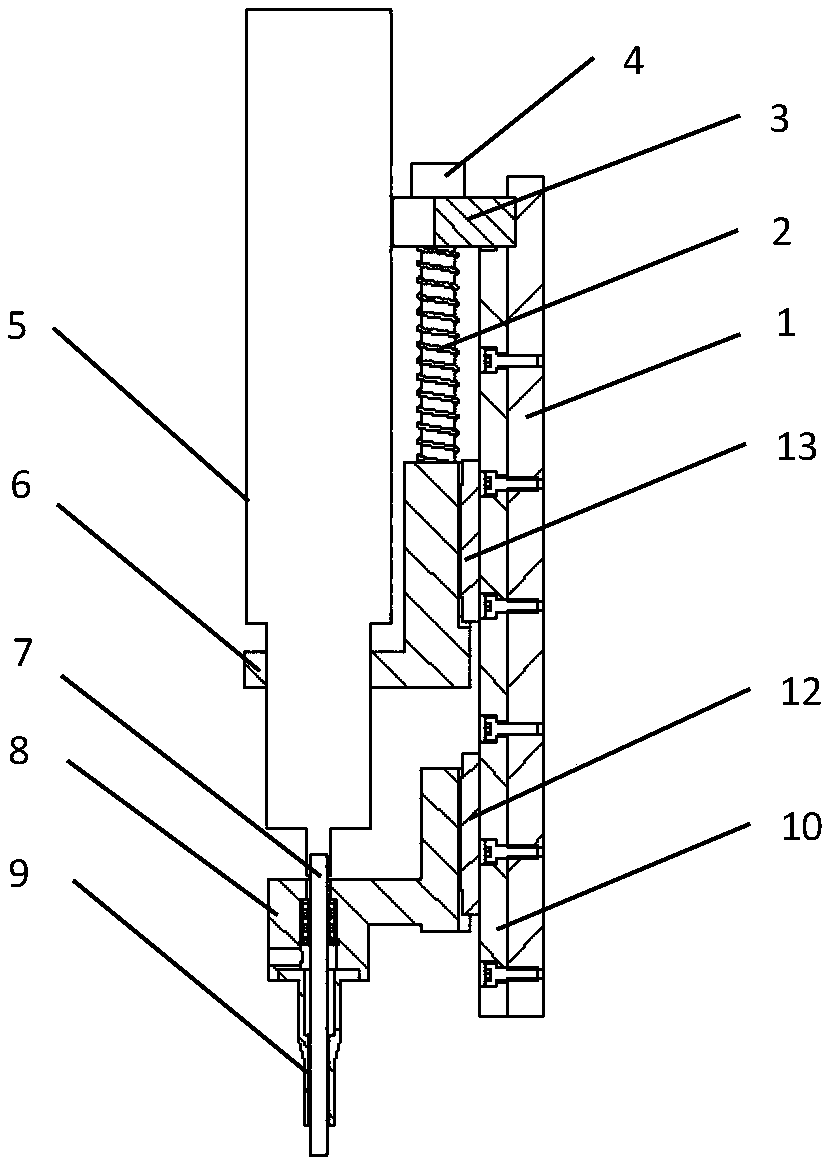
[0016] Such as figure 1 , figure 2 As shown, a Cartesian coordinate robot screwing manipulator includes an output end on which an electric batch jig is fixed. The jig includes a bottom plate 1, an electric batch clamping seat 6, a suction nozzle mounting seat 8, and a linear slide rail 10. Installed vertically on the base plate 1, the first slider 13 is used in conjunction with the linear slide rail 10, the first slider 13 can slide along the linear slide rail 10, the electric batch clamping seat 6 is fixed on the first slider 13, and the electric batch The batch clamping seat 6 is used to clamp the electric batch 5, one end of the first spring 2 is in contact with the bottom plate 1, the other end of the first spring 2 is in contact with the electric batch clamping seat 6, and the second slide rail 13 is in contact with the linear slide rail 10 Used together, the second slide rail 13 can slide along the linear slide rail 10, the second slide block 13 is connected to one end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More