

Locust hopping simulating robot with gliding function
A technology of robots and locusts, applied in the field of robots, can solve problems such as energy loss and large ground impact, and achieve the effects of reducing ground impact force, improving stability, and good mechanism robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
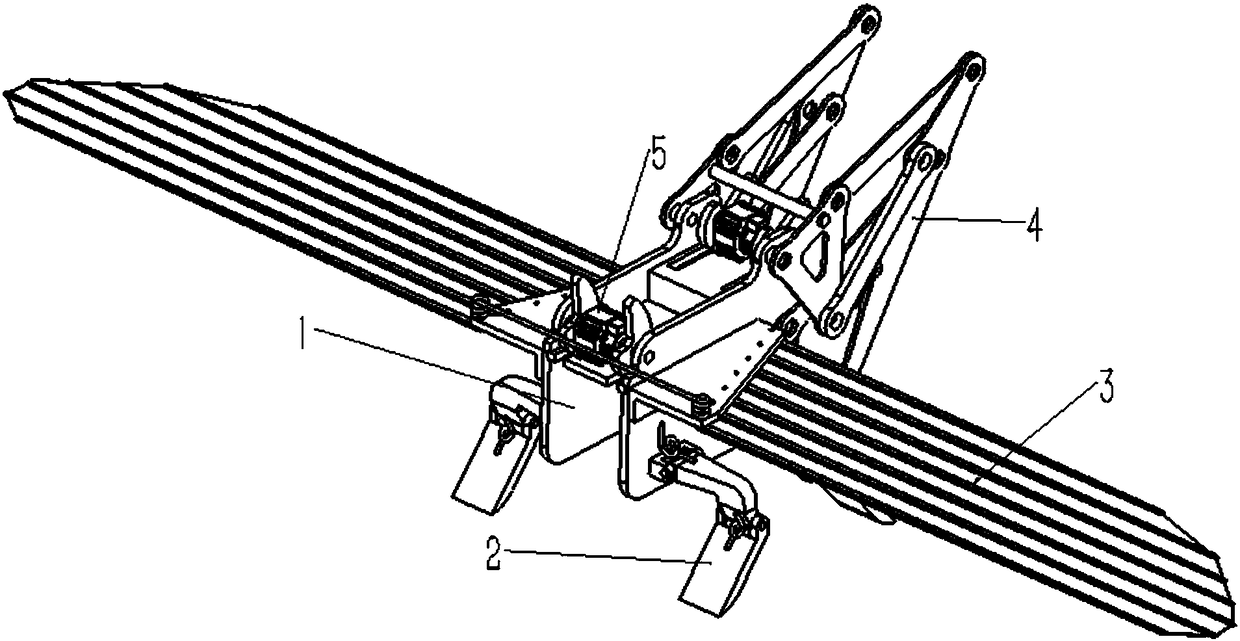
[0041] refer to figure 1 The locust-like jumping robot with gliding function of the present invention includes a trunk structure 1, a buffer leg structure 2, a gliding wing structure 3, a jumping leg structure 4, and a driving module 5.
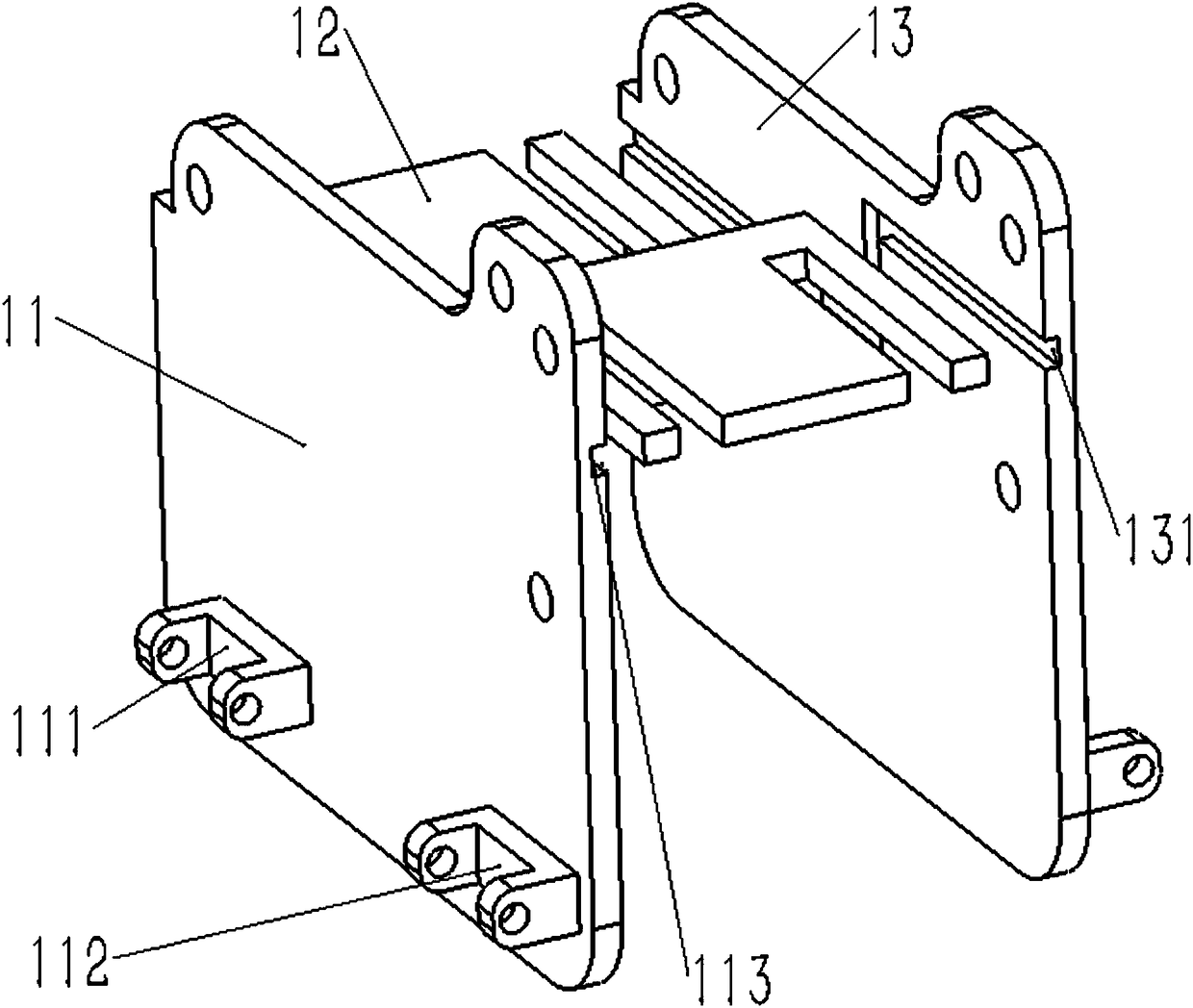
[0042] refer to figure 2 , The torso structure 1 includes three parts: a left connecting plate 11 , a right connecting plate 13 , and a middle connecting plate 12 . The connection relationship between the left connecting plate 11, the right connecting plate 13, and the middle connecting plate 12 is: the left connecting plate 11 is fixedly connected through the first positioning groove 113 on the left connecting plate 11 and the positioning of the middle connecting plate 12, and the right The connecting plate 13 is fixedly connected by the second positioning groove 131 on the right connecting plate 13 and the middle connecting plate 12 , and the left connecting plate 11 and the right connecting plate 13 are symmetrical with respect to the ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More