

Deep learning-based quick automatic capture and placement method
A deep learning and fast technology, applied in neural learning methods, image data processing, instruments, etc., can solve problems such as ineffective processing, and achieve the effect of fast and convenient deployment, simple equipment, and fast and convenient deployment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0025] The present invention provides a fast automatic grasping and placement method based on deep learning, which specifically includes:
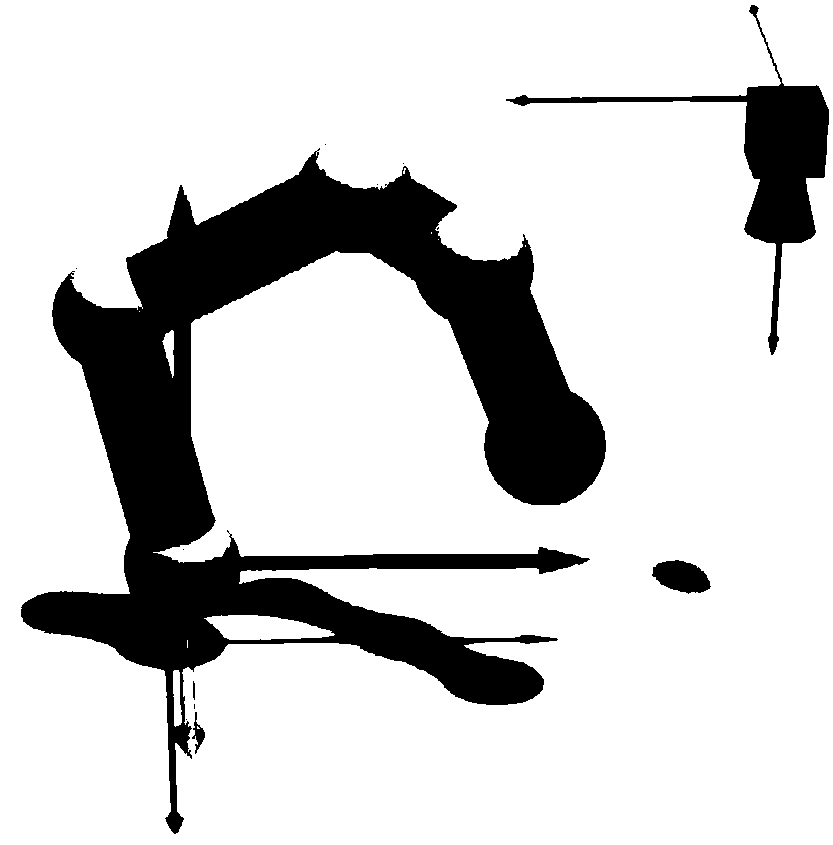
[0026] 1. Installation scheme. First install the robotic arm, and the 3D camera is installed above the side of the robotic arm. The field of view of the camera should overlap with the operating range of the robotic arm as much as possible, so as to maximize the operating space. Such as figure 1 shown. The robotic arm adopts a multi-axis robotic arm, which can complete various postures and spatial ranges. The 3D camera uses a structured light camera, which can accurately obtain color information and depth information in the field of view, and the error and noise of the depth information are small. If there is an unsatisfactory light situation, the scheme of placing a supplementary light above.
[0027] 2. Calib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More