

Gyroscope filtering method based on Sage-Husa Kalman filtering
A Kalman filter and gyroscope technology, applied in low-cost gyroscope output signal processing and inertial navigation fields, can solve the problems of cumbersome Kalman filter steps, lack of generality, etc., to achieve stable and reliable algorithm, ensure noise estimation accuracy, Improve the effect of filtering and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be further described below in conjunction with the accompanying drawings.
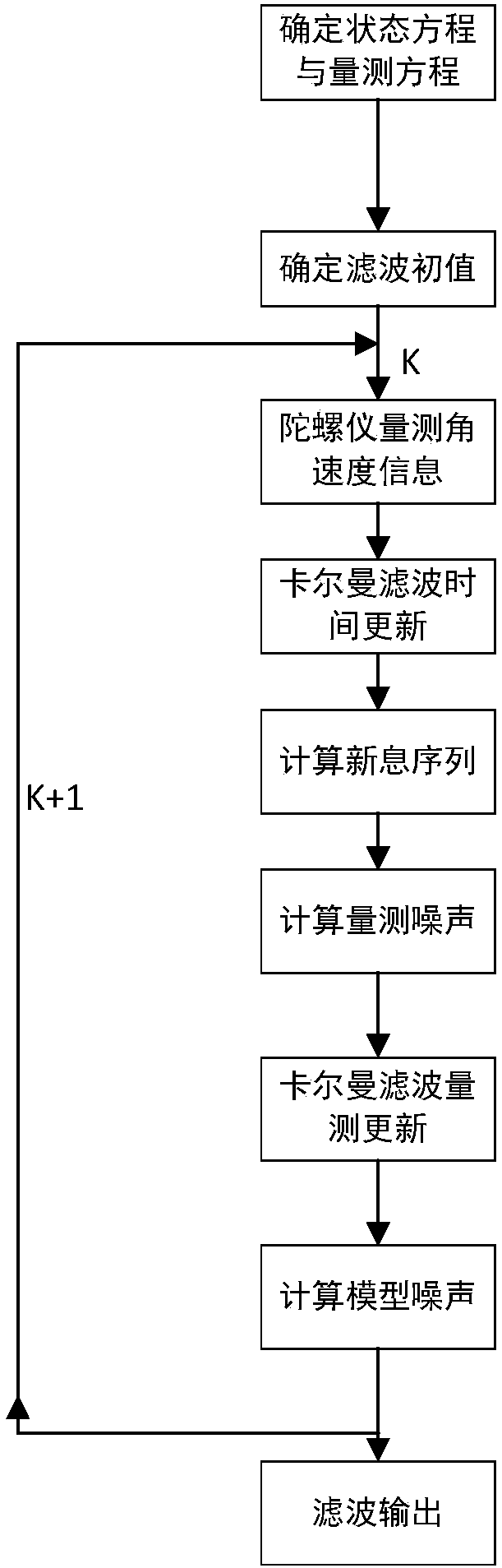
[0052] (1) if figure 1 As shown, for the traditional Kalman filter or the Sage-Husa Kalman filter, the state equation and measurement equation of the system must be established first, and then the initial value of the filter is set to enter the solution iteration cycle.
[0053]For the gyroscope used in drones, because the navigation and control system has high requirements for real-time performance, the sampling frequency of the gyroscope is extremely fast, and the data change rate of the gyroscope between two data samples is 0; As part of the state quantity to improve the filtering effect and stability, the state equation and measurement equation are obtained:
[0054]
[0055]
[0056] One-step state transition matrix obtained from the above formula ε(k-1) is white noise with a mean value of zero; Z(k) is the angular velocity observation value at time k, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More