

Electric-gas compound driving flexible finger eagle-claw-imitating logistics packaging manipulator
A packaging manipulator and flexible finger technology, which is applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of impact, inconsistent size, and inability to adapt to shapes of complex objects to be grasped, and achieve accurate and reliable grasping, good cushioning, and light muscle effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
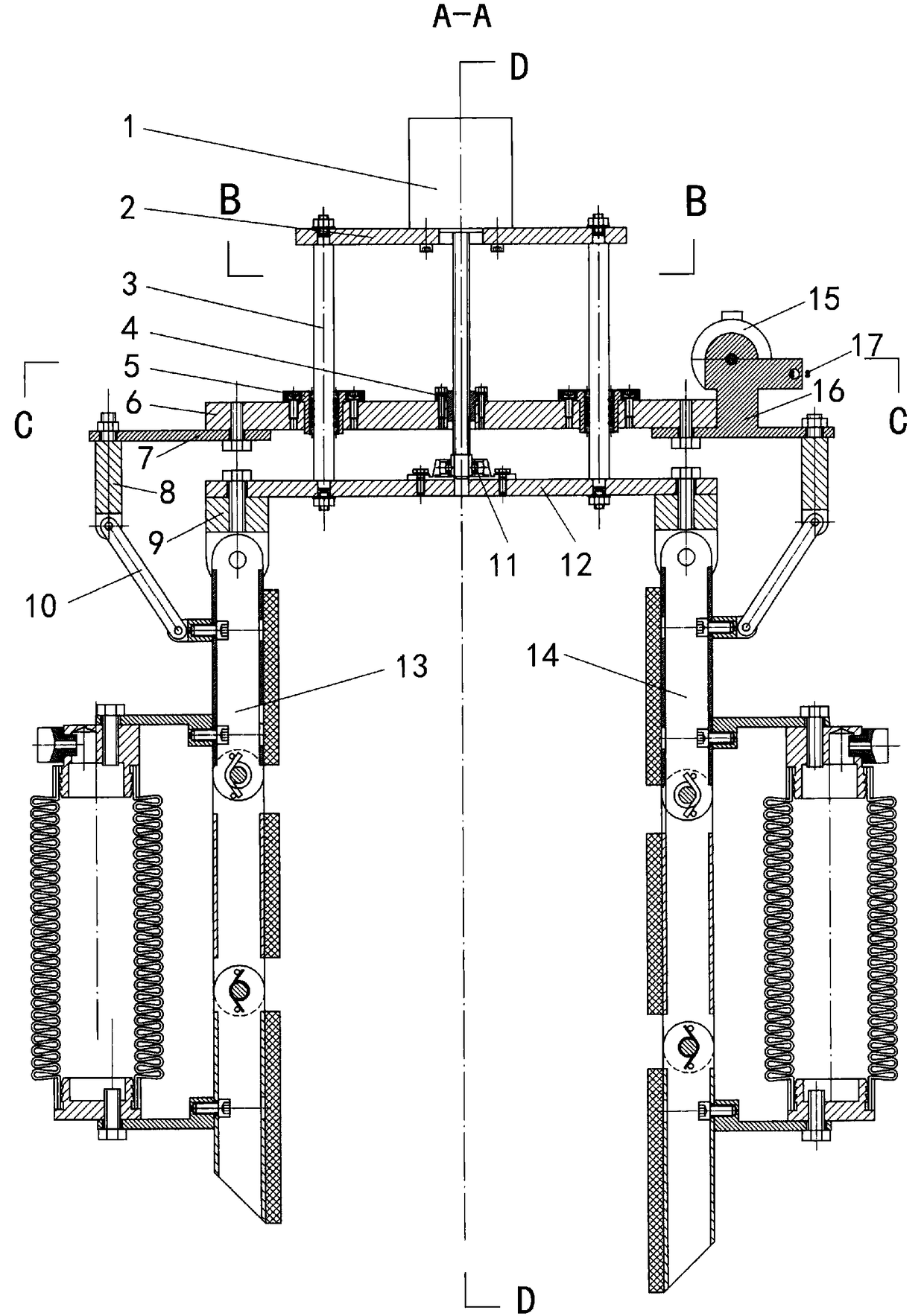
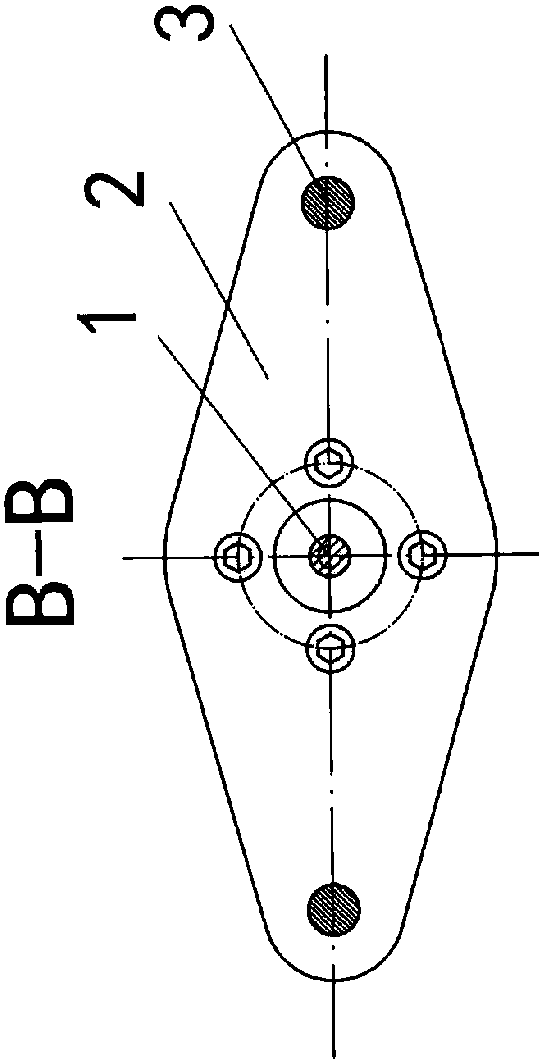
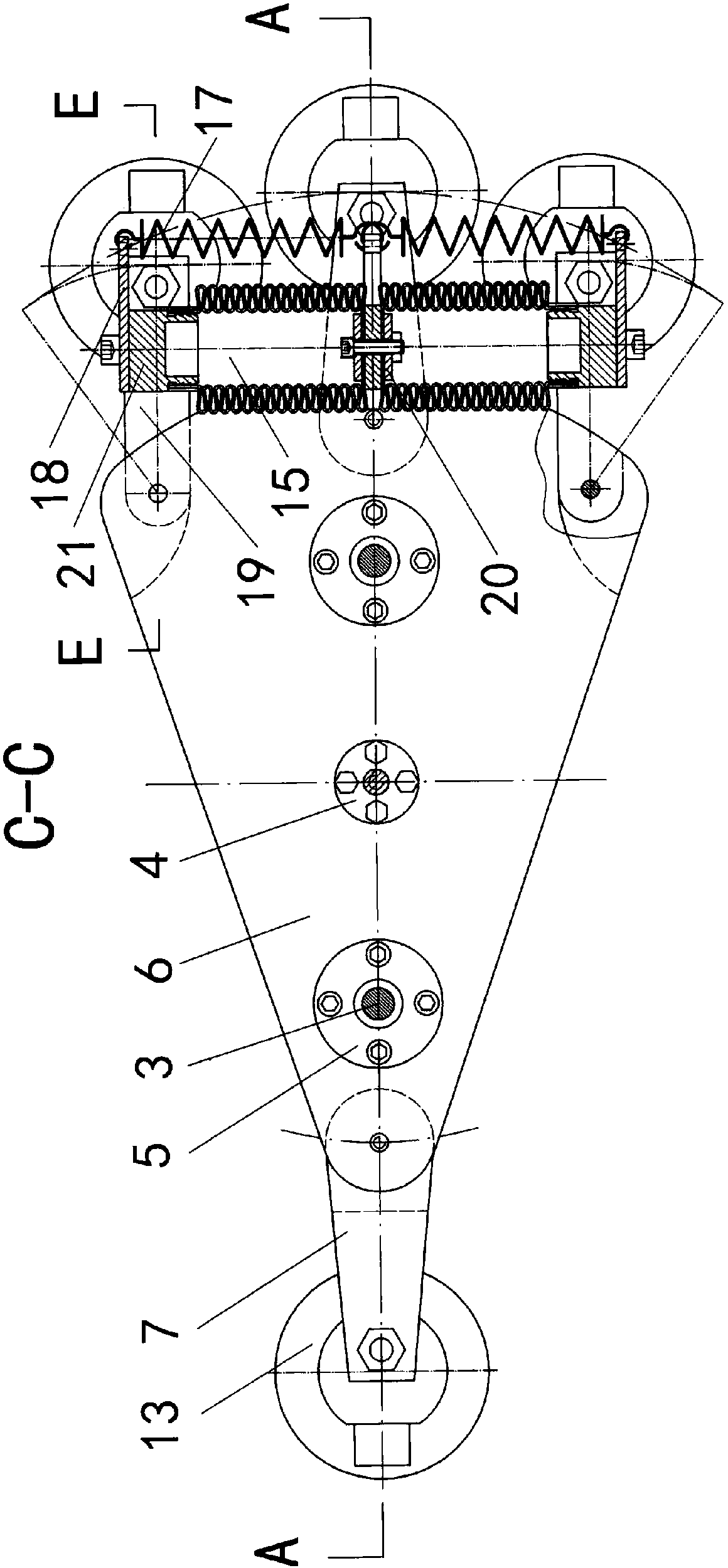
[0039] An electric-pneumatic composite driving flexible finger imitation eagle claw logistics packaging manipulator, including a screw shaft motor 1, an upper seat plate 2, a guide coupling rod 3, a screw nut seat 4, a linear bearing 5, a driving plate 6, and a pushing plate 7 , push rod 8, fixed finger seat 9, connecting rod 10, base plate 12, short finger 13, long finger 14, single-head bellows muscle 15, push plate with ridge 16, tension spring 17, small sup...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More