

System and method for patrol based on coordination of multiple unmanned surface vehicles
An unmanned boat, collaborative control technology, applied in the control/adjustment system, two-dimensional position/channel control, non-electric variable control and other directions, can solve the problems of limited movement ability and small coverage of a single boat
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
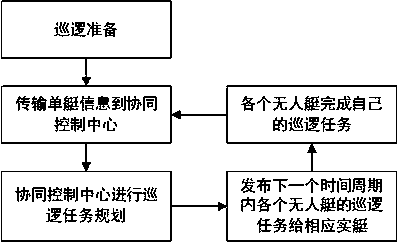
[0026] Such as figure 2 As shown, this patrol method based on the coordination of multiple unmanned vehicles uses the above-mentioned patrol system based on the coordination of multiple unmanned vehicles. The specific operation steps are as follows:
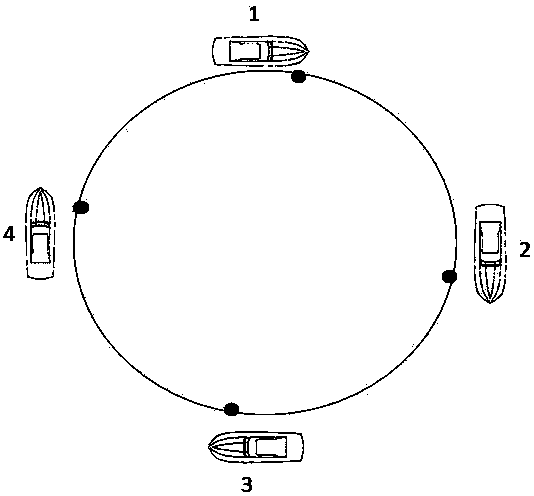
[0027] S01, patrol preparation: according to the patrol area and the number of unmanned boats participating in the patrol task, assign an initial patrol position to all unmanned boats in turn, and send each unmanned boat to the initial position.
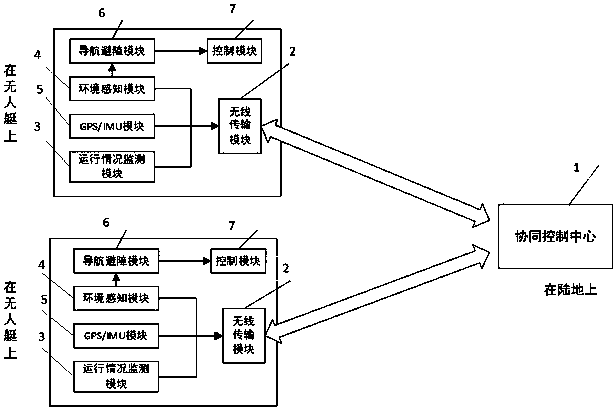
[0028] S02, transmit single-boat information to the cooperative control center 1: each unmanned boat uses the position and attitude of the GPS / IMU module 5, the monitoring status obtained by the operation monitoring module 3 and the environmental information sensed by its own environment perception module 4 to use wireless The transmission module 2 uploads to the collaborative control center 1.
[0029] S03, the cooperative control center 1 performs patrol task planning: the cooperat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More