

Three-dimensional scene reconstruction method and device based on vision SLAM
A 3D scene and vision technology, applied in 3D modeling, character and pattern recognition, image data processing, etc., can solve the problems of high hardware requirements, poor 3D scene accuracy, and high computational complexity, and achieve high running speed and high precision. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below with reference to the accompanying drawings, so as to make the present invention clearer and easier to understand. Those skilled in the art would recognize that the described embodiments can be modified in various ways or combinations thereof without departing from the spirit and scope of the invention. Accordingly, the drawings and description are illustrative in nature and not intended to limit the scope of the claims. Also, in this specification, the drawings are not drawn to scale, and like reference numerals denote like parts.
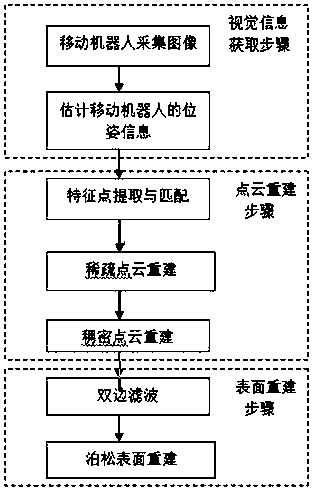
[0021] refer to figure 1 , the invention discloses a three-dimensional scene reconstruction method based on visual SLAM, comprising the following steps:
[0022] Step S1: Acquisition of visual information: make the mobile robot move freely in the 3D scene to collect images, and use the SLAM algorithm to estimate the pose information of the mobile robot;
[0023] Step S2: Poi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More