

Granular-material-clogging-based hybrid driving rigidity-controllable continuum robot
A hybrid drive and continuum technology, applied in the field of flexible robots, can solve the problems of reducing control accuracy and not being able to actively resist compression loads, achieving good adaptability and improving stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
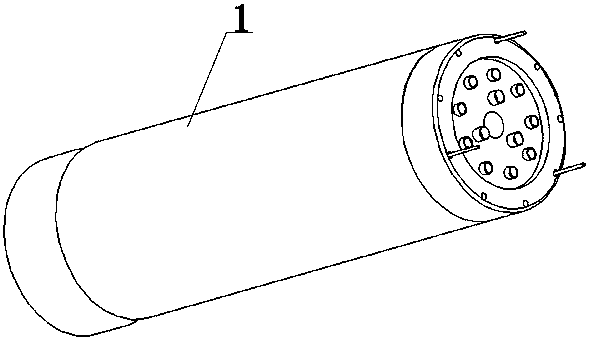
[0040] Such as Figure 1-7 As shown, a hybrid-driven controllable stiffness continuum robot based on granular blocking, the robot includes a first continuum unit 1,
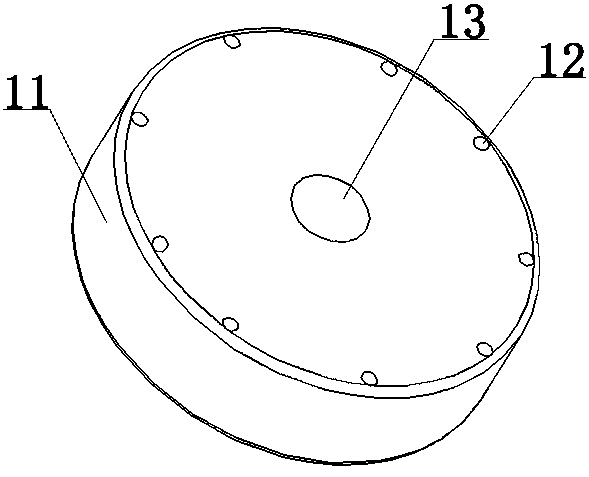
[0041] The first continuum unit 1 includes a flexible support outer cylinder 22, which is a hollow cylindrical structure made of silicone material, and three flexible support outer cylinder through-holes 23 are evenly distributed along the circumferential direction of its two ends and correspondingly opened. A plastic inner pipe 26 is arranged concentrically;
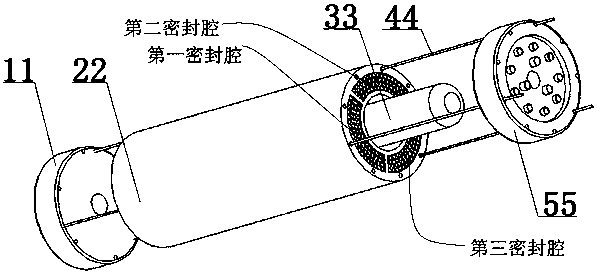
[0042] In the annular area between the inner wall of the flexible support outer cylinder 22 and the outer wall of the plastic inner pipe 26, three partitions 24 are uniformly arranged along the circumferential direction of the annular area, dividing the annular area into three sealed cavities, each The interior of the sealed cavity is filled with granular bodies 25;
[0043] The plastic inner pipe 26 is a hollow cylindrical structure, and an artificial p...
Embodiment 2
[0049] Such as Figure 8 , 9 As shown, a hybrid-driven controllable stiffness continuum robot based on granular blockage, the robot includes three identical single continuum units connected in series end to end, which are respectively the first continuum unit 1 and the second continuum unit 2. The third continuum unit 3;
[0050] The first continuum unit 1 or the second continuum unit 2 or the third continuum unit 3 includes a flexible support outer cylinder 22, which is made of silica gel material, which is a hollow cylindrical structure, and is evenly distributed along the circumferential direction of its two ends. There are 9 through holes 23 in the outer cylinder of flexible support, and a plastic inner pipe 26 is arranged concentrically inside;
[0051] In the annular area between the inner wall of the flexible support outer cylinder 22 and the outer wall of the plastic inner pipe 26, three partitions 24 are uniformly arranged along the circumferential direction of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More