

Depth distance measuring method, device, computer readable storage medium and electronic equipment
A technology of depth distance and installation position, applied in the field of drones, can solve problems such as inaccurate depth distance and unfavorable real-time obstacle avoidance of drones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] Specific embodiments of the present disclosure will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present disclosure, and are not intended to limit the present disclosure.
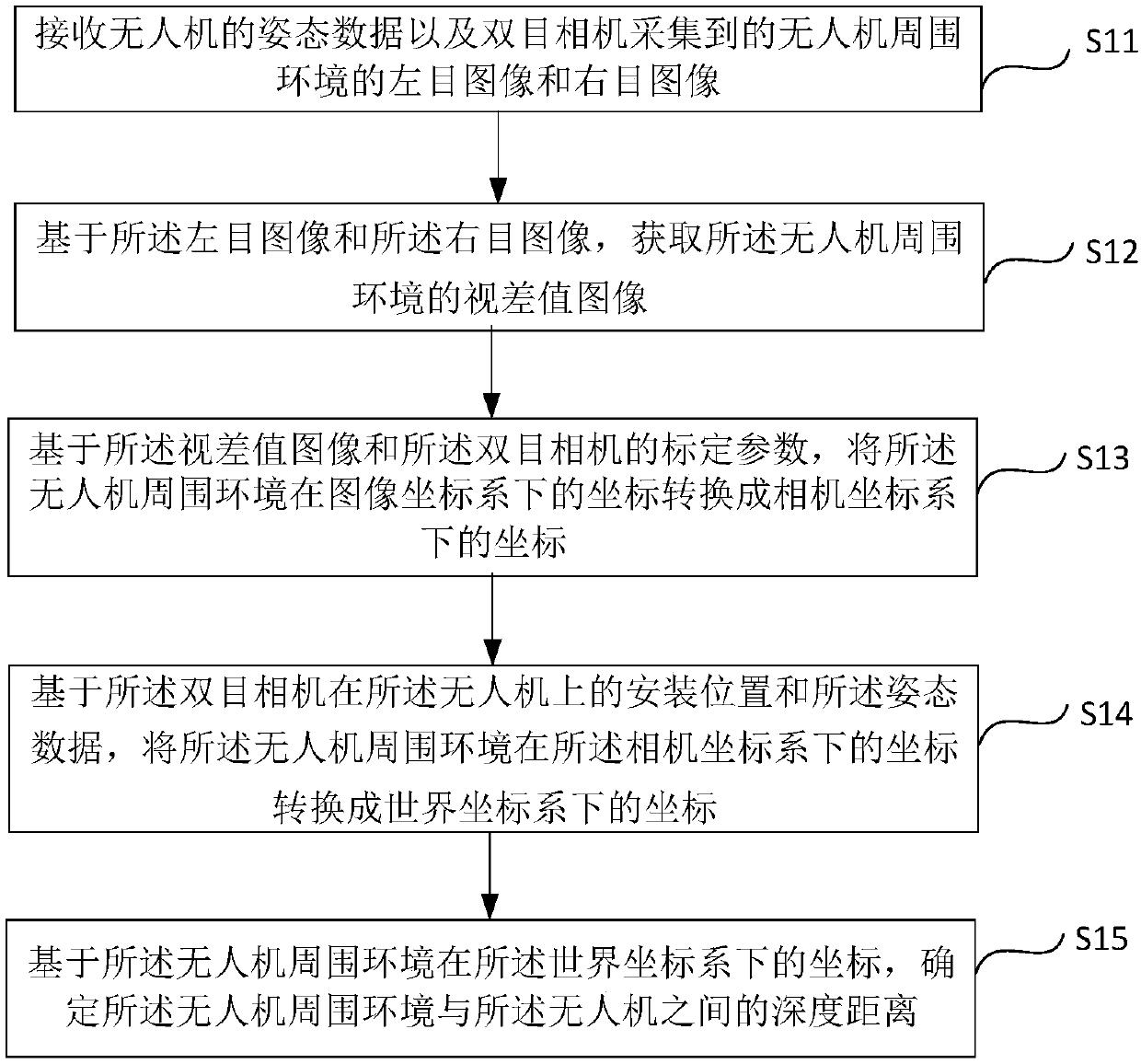
[0094] According to an embodiment of the present disclosure, a depth distance measurement method is provided, which can be applied to unmanned aerial vehicles, and can be used in the 3D environment information reconstruction algorithm of the UAV obstacle avoidance system based on embedded real-time binocular vision Realized to realize the UAV's obstacle avoidance and ranging functions. Such as figure 1 As shown, the method may include the following steps:
[0095] In step S11, the attitude data of the UAV and the left-eye image and right-eye image of the surrounding environment of the UAV collected by the binocular camera are received. Wherein, the attitud...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More