

Vehicle-mounted mechanical arm ball pickup system based on SLAM and ball pickup method of ball pickup system
A technology of mechanical arm and subsystem, applied in the field of mobile robots, can solve problems such as the inability to accurately control the force of grasping the ball, the inability to grasp the sphere, and the deformation of the sphere
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0037] Simultaneous Localization And Mapping (SLAM) technology can be used to solve the problems of positioning, navigation and map construction when mobile robots run in unknown environments. The biggest feature of SLAM technology is that it can make the robot move autonomously in an unknown environment, use the created map to locate itself, and update the map according to the positioning result.
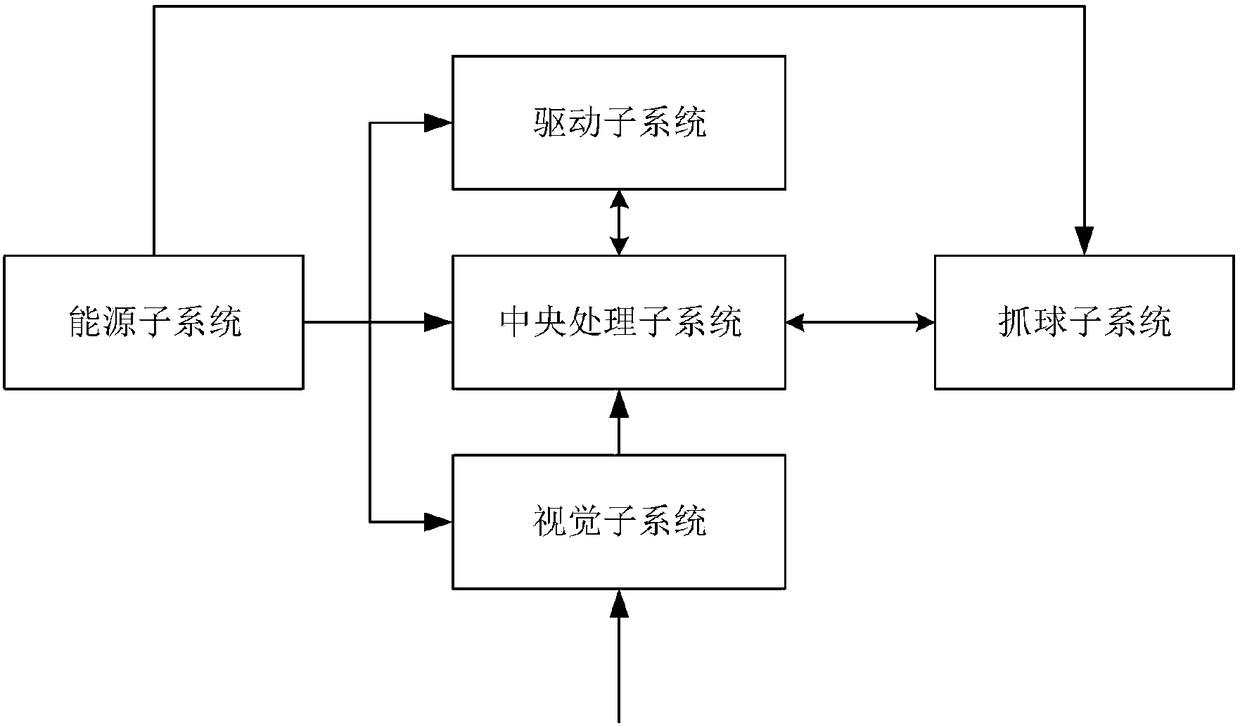
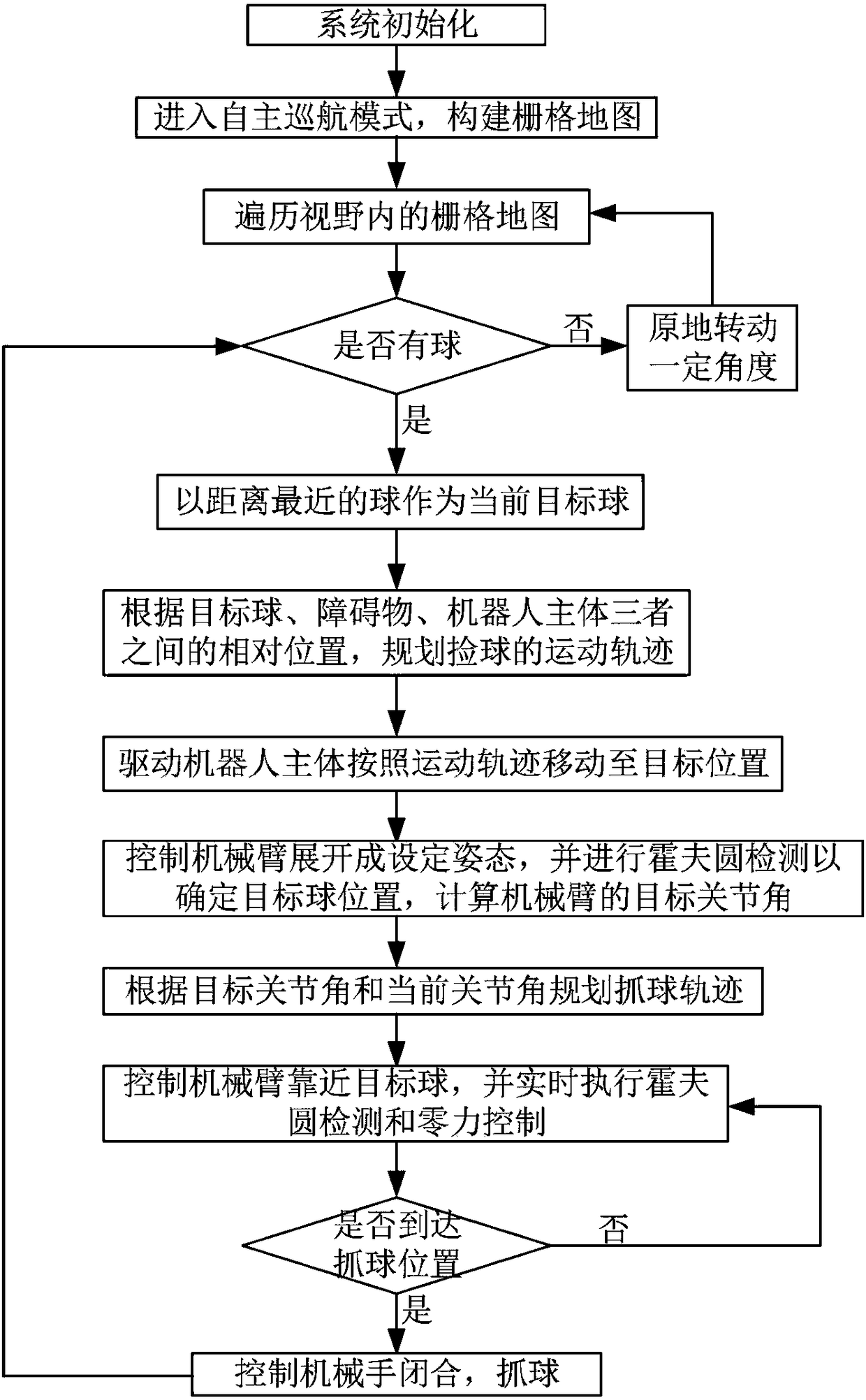
[0038]Based on SLAM technology, the present invention can solve the problem of placing a robot in an unknown position in an unknown environment, allowing the robot to gradually draw a complete map of the environment while deciding which direction the robot is going to, and finally move to the target position without obstacles. In addition, the present invention is also based on the zero-force control method, and controls the three-fingered manipulat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More