

Simple manipulator
A manipulator, a simple technology, applied in the field of manipulators, can solve the problems of complex manipulator structure, inapplicability of manipulators, low economy, etc., and achieve the effect of simple and reliable structure, simple structure and high sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The implementation of the present invention will be illustrated by specific specific examples below, and those skilled in the art can easily understand other advantages and effects of the present invention from the contents disclosed in this specification.
[0015] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
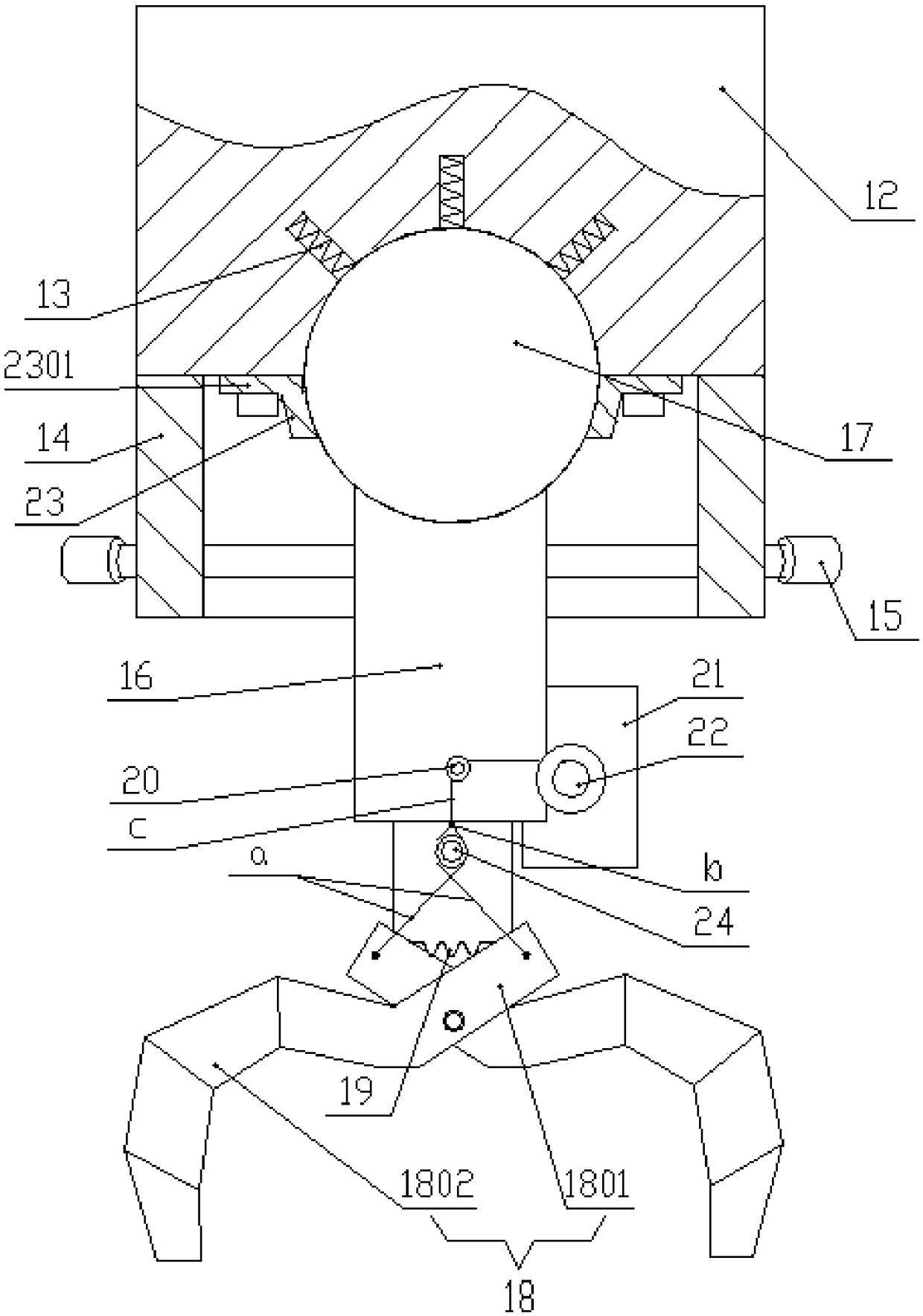
[0016] Such as figure 1 As shown, a simple manipulator includes a connecting part and a grabbing mechanism; the connecting part includes a handle 12 connected to an external member, and a hemispherical groove is provided on the bottom surface of the handle 12, and at the bottom of the groove A number of blind holes are provided, and the blind holes are arranged radially along the groove, and the bottom of each blind hole is fixedly connected with a tension spring 13 that does not protrude from the blind hole; the bottom end of the handle 12 is also vertical A sleeve 14 is provided on the ground, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More